
模糊PID控制双容水箱液位控制-模糊控制
资源:
双容水箱液位模糊PID控制MATLAB仿真-电子商务文档类资源-CSDN文库
模糊控制原理
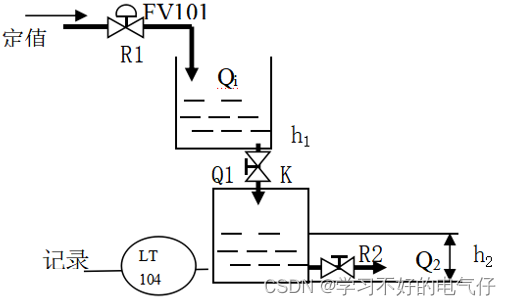
水流入量Qi由调节阀R1(FV101)控制,流出量Q2由用户通过负载阀R2来改变,被调量为下水箱水位h2,流量Q1只与容器1的液位h1有关,分析水位在调节阀开度扰动下的动态特性。
两容器的流出阀均为手动阀门,流量Q1只与容器1的液位h1有关,与容器2的液位h2无关。容器2的液位也不会影响容器1的液位,两容器无相互影响。由于两容器的流出阀均为手动阀门,故有:
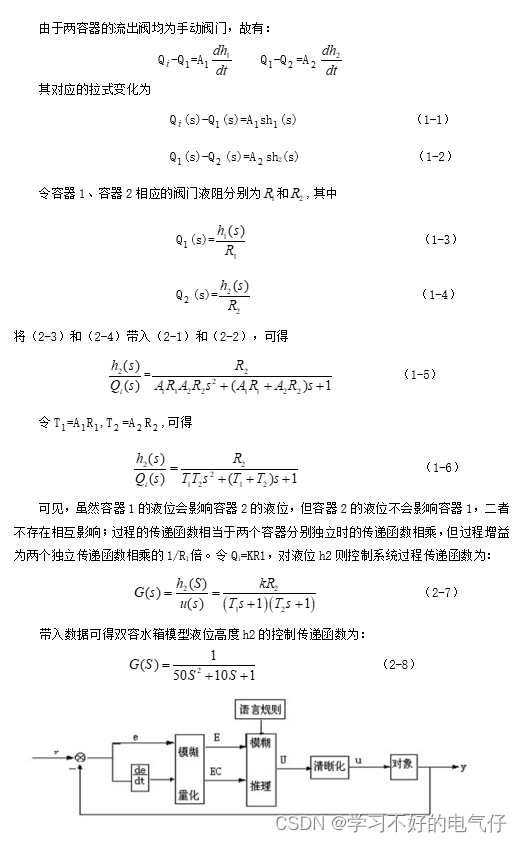
输入值的模糊化就是将用于计算的输入对应到标准化的数值区间,并根据量化结果和模糊化子集得到该输入对子集的隶属度。我们在使用偏差e和偏差增量ec作为输入实现控制参数调整则需要对e和ec进行模糊化。
首先,我们确定e和ec的模糊子集,对于PID控制我们选则:负大[NB]、负中[NM]、负小[NS]、零[ZO]、正小[PS]、正中[PM]、正大[PB]等7个语言变量就能够有足够精度表达其模糊子集。所以我们定义e和ec的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB}。
确定了模糊子集,我们怎么将e和ec的具体值和模糊集对应上呢?我们需要引入量化函数。要确定量化函数,我们先引入e和ec模糊集对应的论域,定义为{-4.5,-3,-1.5,0,1.5,3,4.5}。对于任何一个物理量测量信号都有一个量程范围,我们记为Vmax和Vmin,和自然在PID调节时设定值的范围预期相同,所以偏差e的范围就是Vmin-Vmax到Vmax-Vmin的范围内,而偏差的增量范围则是其两倍。
二、 模糊控制规则
模糊控制规则如下表
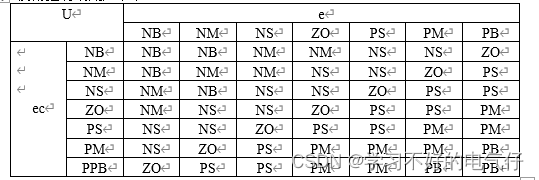
表2.1 模糊控制规则表
三、模糊集及论域定义
对误差 E、 误差变化 EC 及控制量 U 的模糊集及论域定义如下:
E、 EC 和 U 的模糊集均为{NB, NM, NS, ZO, PS, PM, PB}
E 和 EC 论域均为{-3, -2, -1, 0, 1, 2, 3}
U 的论域为{-4. 5, -3, -1. 5, 0, 1. 5, 3, 4. 5}
E 的隶属函数图形如下图
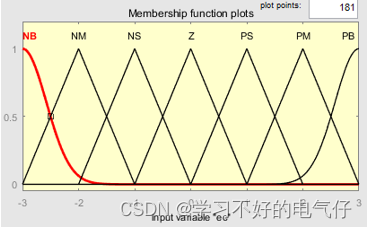
表3.1E 的隶属函数图形
EC 的隶属函数图形如下图
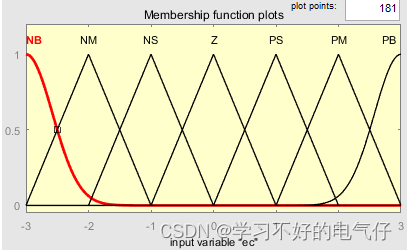
表3.2 EC 的隶属函数图形
U 的隶属函数图形如下图
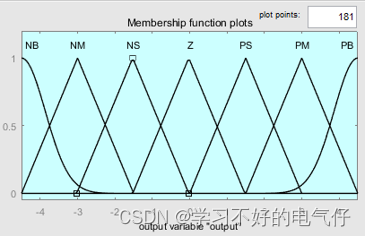
表3.3U 的隶属函数图形
一共两个输入,每个输入分七种情况,共7*7=49.
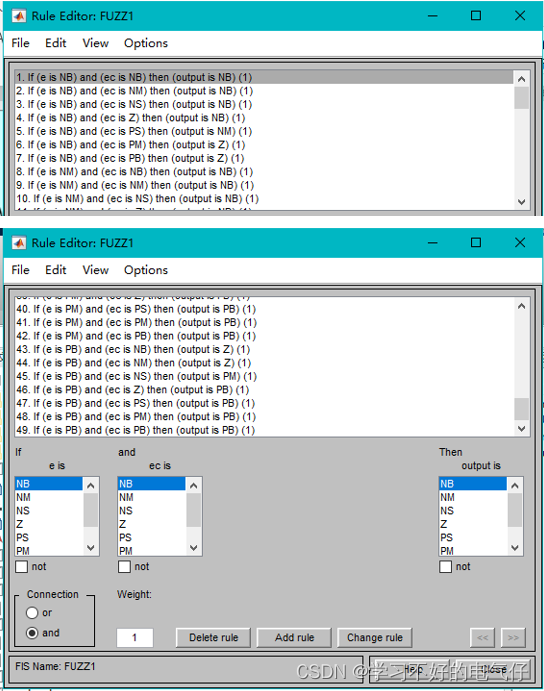
图3.4 编译规则
Matlab仿真模型
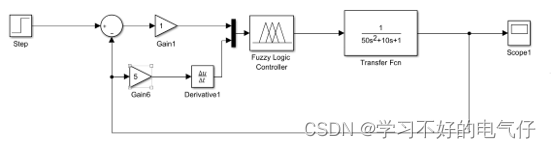
图4.1 matlab仿真模型
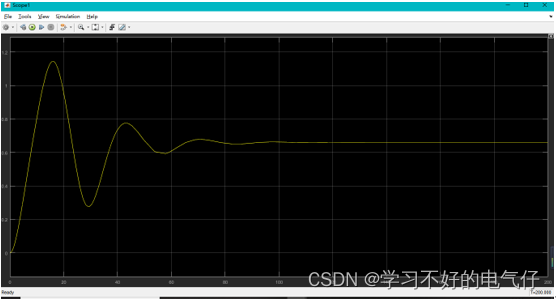
图4.2 原始波形图
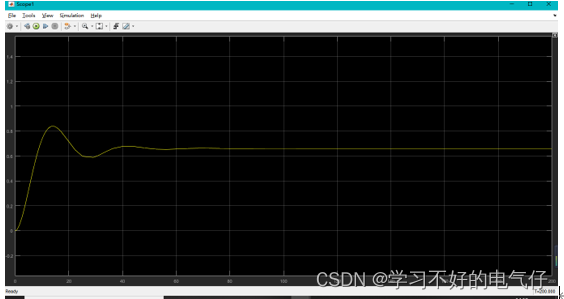
图4.3减小微分参数后的波形图
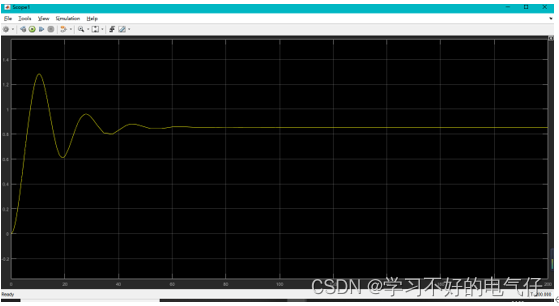
图4.3增大比例参数后的波形图
总结:
从上面的图像对比可知,模糊控制能够使得反应时间加快,明显改善了系统的动态特性。而在增加了随机扰动后,能够看到系统任然能够保持较好的稳态特性,说明 PID 控制器在具备较强的抗扰动能力。模糊控制器的设计中,参数调整规则变化对控制性能的影响较大,其次是隶属函数,量化因子影响最小。从调试步骤看,则往往先看量化因子,对于简单的系统,通常只要改变量化因子即可达到基本的控制要求。但是较复杂的控制系统,既要调节量化因子还要调节比例因子,才能达到共同控制系统的目的。