
ADI Blackfin DSP处理器-BF533的开发详解59:DSP控制ADXL345三轴加速度传感器的应用2(含源码)
硬件准备
ADSP-EDU-BF533:BF533开发板
AD-HP530ICE:ADI DSP仿真器
软件准备
Visual DSP++软件
硬件链接

MEMS三轴加速度传感器
我做了一个三轴加速度传感器的子卡,插在这个板子上,然后写了一些有意思的应用程序。

硬件实现原理
MEMS 子卡板连接在 ADSP-EDU-BF53x 开发板的扩展端口 PORT3 和 PORT4 上,板卡插入时,应将扩展子卡板上标注的“圆圈”符号与板卡上的“圆圈”对准插入,避免子卡板反向接入板卡。
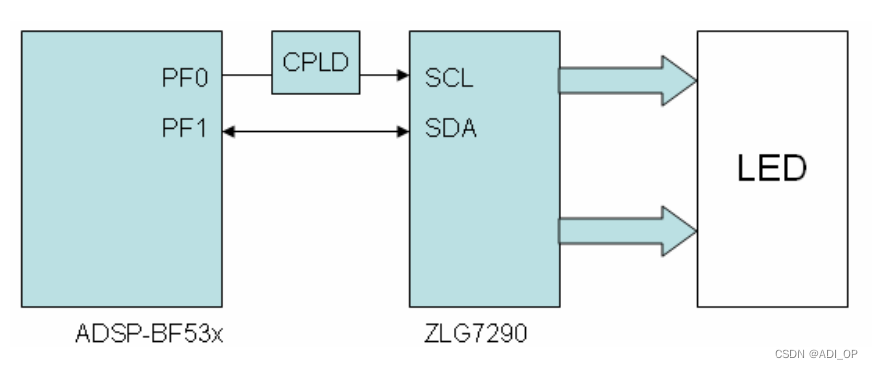
MEMS 子卡板上设计了一个 LED 控制器,用于控制板卡上的 25 个 LED。控制器采用 ZGL7290,该芯片通过 IIC接口控制,使用时,需通过 CPLD 使能 PF 接口模拟 IIC 的功能。为了体现出 MEMS 的效果,板上 LED 排列顺序采用“十”字形,控制采用动态扫描方式,分 5 段接入控制器。
DEVICE_OE 寄存器(读/写):
DEVICE_OE 寄存器地址:0x20320000
DEVICE_OE 寄存器设置硬件设备上一些控制管脚的电平状态。
DEVICE_OE 寄存器位功能:

PF0_SET:PF0 模拟 IIC 总线 SCL 接口或 PF0 中断功能使能
1:关闭 I2C_SCL 输入信号, 使能 PF0 中断信号
0:使能 I2C_SCL 输入信号,关闭 PF0 中断信号
选通 MEMS 子卡板上 IIC 功能接口,需将 PF0_SET 位设置为 0。
硬件连接示意图
代码实现功能
代码实现了通过 IIC 接口配置 LED 控制器的控制寄存器,控制器控制 LED 灯点亮或者熄灭。运行代码后,可以看到 MEMS 子卡板上的 LED 灯依次点亮、熄灭。
测试步骤
1. 将仿真器(ICE)与 ADSP-EDU-BF53x 开发板和计算机连接好,将 MEMS 子卡板插入扩展板接口 PORT3 和PORT4。
2. 先给 ADSP-EDU-BF53x 开发板上电,再为仿真器(ICE)上电。
3. 运行 VisualDSP++ 5.0 软件,选择合适的 BF53x 的 session 将仿真器与软件连接。
4. 加载 VisualDSP++ 5.0 工程文件 BF53x_ZLG7290.dpj 文件,编译并全速运行。
测试结果
MEMS 子卡板上的 LED 呈发散状依次点亮,全部点亮后,又依次收缩熄灭,重复显示。
程序源码
cpu.c
#ifndef CPU_H
#define CPU_H
#include
/**********************************************************************************
- 名称 :Set_PLL
- 功能 :初始化内核时钟和系统时钟
- 入口参数 :pmsel pssel 设置参数
- 出口参数 :无
***********/
void Set_PLL(int pmsel,int pssel)
{
int new_PLL_CTL;
pPLL_DIV = pssel;
asm(“ssync;”);
new_PLL_CTL = (pmsel & 0x3f) << 9;
pSIC_IWR |= 0xffffffff;
if (new_PLL_CTL != pPLL_CTL)
{
pPLL_CTL = new_PLL_CTL;
asm(“ssync;”);
asm(“idle;”);
}
}
/ - 名称 :Setup_Flags
- 功能 :初始化PF口
- 入口参数 :无
- 出口参数 :无
****************************************************************************/
void Setup_Flags(void)
{
*pFIO_INEN = 0x0020;
*pFIO_DIR = 0x001f;
*pFIO_EDGE = 0x0000;
*pFIO_MASKA_S = 0x0020;
*pFIO_POLAR = 0x0020;
}
/****************************************************************************
- 名称 :Init_EBIU
- 功能 :初始化并允许异步BANK存储器工作
- 入口参数 :无
- 出口参数 :无
****************************************************************************/
void Init_EBIU(void)
{
*pEBIU_AMBCTL0 = 0x7bb07bb0;
*pEBIU_AMBCTL1 = 0xffc07bb0;
*pEBIU_AMGCTL = 0x000f;
}
/****************************************************************************
- 名称 :Init_SDRAM
- 功能 :初始化SDRAM
- 入口参数 :无
- 出口参数 :无
****************************************************************************/
void Init_SDRAM(void)
{
*pEBIU_SDRRC = 0x00000817;
*pEBIU_SDBCTL = 0x00000013;
*pEBIU_SDGCTL = 0x0091998d;
ssync();
}
/****************************************************************************
- 名称 : delay
- 功能 : 延时函数
- 入口参数 :无
- 返回值 :无
****************************************************************************/
void delay(unsigned int tem)
{
int i;
for(i=0;i
}
#endif
i2c.c
#include
#include “i2c.h”
#define CORE_CLK_IN 27 * 1000 * 1000
#define SET_PF(pf)
do{
*pFIO_FLAG_S = (pf);
ssync();
}while(0)
#define CLR_PF(pf)
do{
*pFIO_FLAG_C = (pf);
ssync();
}while(0)
#define SET_PF_OUTPUT(pf)
do{
*pFIO_INEN &= ~(pf);
*pFIO_DIR |= (pf);
ssync();
}while(0)
#define SET_PF_INPUT(pf)
do{
*pFIO_DIR &= ~(pf);
*pFIO_INEN |= (pf);
ssync();
}while(0)
int get_core_clk(void)
{
int tempPLLCTL;
int _DF;
int VCO;
int MSEL1;
tempPLLCTL = *pPLL_CTL;MSEL1 = ((tempPLLCTL & 0x7E00) >> 9);
_DF = tempPLLCTL & 0x0001;VCO = MSEL1 * __CORE_CLK_IN__;
if(_DF == 1)VCO /= 2;return VCO;
}
void delay_ns(unsigned int core_clock, unsigned long long count)
{
count *= core_clock;
count /= 1000000000;
while(count–);
}
int _get_sdata(i2c_device * dev)
{
return ((*pFIO_FLAG_D & dev->sdata) ? 1 : 0);
}
void i2c_init(i2c_device * dev)
{
dev->core_clock = get_core_clk();
dev->delay_ns = delay_ns;
*pFIO_DIR |= dev->sclk | dev->sdata;
ssync();
}
void i2c_deinit(i2c_device * dev)
{
dev->sclk = 0;
dev->sdata = 0;
*pFIO_DIR &= ~(dev->sclk | dev->sdata);
ssync();
}
void i2c_start(i2c_device * dev)
{
SET_PF_OUTPUT(dev->sdata);
SET_PF_OUTPUT(dev->sclk);
SET_PF(dev->sdata);
SET_PF(dev->sclk);
delay_ns(dev->core_clock, dev->high_ns);CLR_PF(dev->sdata);
delay_ns(dev->core_clock, dev->low_ns);CLR_PF(dev->sclk);
delay_ns(dev->core_clock, dev->low_ns);
}
void i2c_stop(i2c_device * dev)
{
CLR_PF(dev->sclk);
delay_ns(dev->core_clock, dev->low_ns);
SET_PF_OUTPUT(dev->sdata);
CLR_PF(dev->sdata);
delay_ns(dev->core_clock, dev->low_ns);SET_PF_INPUT(dev->sclk);
delay_ns(dev->core_clock, dev->high_ns);SET_PF_INPUT(dev->sdata);
delay_ns(dev->core_clock, dev->high_ns);
}
int i2c_read_ack(i2c_device * dev)
{
int ret = 0;
SET_PF_INPUT(dev->sdata);
delay_ns(dev->core_clock, dev->high_ns/3);SET_PF(dev->sclk);
delay_ns(dev->core_clock, dev->high_ns/3);ret = _get_sdata(dev);delay_ns(dev->core_clock, dev->high_ns/3);
CLR_PF(dev->sclk);delay_ns(dev->core_clock, dev->low_ns);SET_PF_OUTPUT(dev->sdata);
return ret;
}
int i2c_wait_slave(i2c_device * dev, unsigned int time_out)
{
int ret;
int count = time_out * 2 / dev->high_ns;
SET_PF_INPUT(dev->sclk);
delay_ns(dev->core_clock, dev->high_ns/2);do{ret = *pFIO_FLAG_D & dev->sclk;if(ret)break;delay_ns(dev->core_clock, dev->high_ns/2);
}while(count--);SET_PF_OUTPUT(dev->sclk);
return !ret;
}
void i2c_write_ack(i2c_device * dev)
{
SET_PF_OUTPUT(dev->sdata);
CLR_PF(dev->sdata);
delay_ns(dev->core_clock, dev->high_ns/2);
SET_PF(dev->sclk);
delay_ns(dev->core_clock, dev->high_ns);
CLR_PF(dev->sclk);
delay_ns(dev->core_clock, dev->low_ns);
}
int i2c_write(i2c_device * dev, unsigned char value, int need_ack)
{
int ret = -1;
unsigned char index;
SET_PF_OUTPUT(dev->sdata);//send 8 bits to slave
for(index = 0; index < 8; index++){//send one bit to the i2c busif((value<sdata);} else {CLR_PF(dev->sdata);}delay_ns(dev->core_clock, dev->low_ns/2);SET_PF(dev->sclk);delay_ns(dev->core_clock, dev->high_ns);CLR_PF(dev->sclk);delay_ns(dev->core_clock, dev->low_ns/2);
}if(need_ack){ret = i2c_read_ack(dev);
}
return ret;
}
int i2c_read(i2c_device * dev, unsigned char * value, int send_ack)
{
unsigned char index;
*value = 0x00;
SET_PF_INPUT(dev->sdata);
delay_ns(dev->core_clock, dev->high_ns/2);//get 8 bits from the device
for(index = 0; index < 8; index++){SET_PF(dev->sclk);delay_ns(dev->core_clock, dev->high_ns/2);*value <<= 1;*value |= _get_sdata(dev);delay_ns(dev->core_clock, dev->high_ns/2);CLR_PF(dev->sclk);delay_ns(dev->core_clock, dev->low_ns);
}// send ack to slave
if(send_ack){i2c_write_ack(dev);
}
return *value;
}
main.c
#include
/****************************************************************************
- 名称 :main
- 功能 :初始化各函数,实现音频播放
- 入口参数 :无
- 出口参数 :无
****************************************************************************/
void main()
{
int i;
int flag=1;
Set_PLL(16,4);
Init_EBIU();
IIC_Enable();
Setup_Flags();
init_zlg7290();
while(1)
{
delay(100000);
for(i=6;i>0;i–)
{
delay(5000000);
LED_UP(i,flag);
LED_DOWN(i,flag);
LED_LEFT(i,flag);
LED_RIGHT(i,flag);
LED_CENTER(i/4);
}
for(i=1;i<6;i++)
{
LED_UP(i,flag);LED_DOWN(i,flag);LED_LEFT(i,flag);LED_RIGHT(i,flag);LED_CENTER(i/4);delay(5000000);}
}
}
zlg.c
#include
#include “i2c.h”
#define ZLG7290_ADDRESS 0x70
static i2c_device mcu_i2c;
void init_aic23b(void);
int zlg7290_write(unsigned char addr, unsigned char dat);
int zlg7290_read(unsigned char addr, unsigned char * buf);
/****************************************************************************
- 名称 :zlg7290_write
- 功能 : 写zlg7290寄存器函数
- 入口参数 :addr:寄存器偏移地址
dat:寄存器配置值 - 出口参数 :返回0
****************************************************************************/
int zlg7290_write(unsigned char addr, unsigned char dat)
{
int ret = -1;
i2c_start(&mcu_i2c);
if(i2c_write(&mcu_i2c, ZLG7290_ADDRESS, 1)){
i2c_stop(&mcu_i2c);
return ret;
}
if(i2c_write(&mcu_i2c, addr, 1)){
i2c_stop(&mcu_i2c);
return ret;
}
i2c_write(&mcu_i2c, dat, 1);
i2c_stop(&mcu_i2c);
return 0;
}
/****************************************************************************
- 名称 :zlg7290_read
- 功能 : 读zlg7290寄存器函数
- 入口参数 :addr:寄存器偏移地址
buf:寄存器读取数据缓存 - 出口参数 :返回0
****************************************************************************/
int zlg7290_read(unsigned char addr, unsigned char * buf)
{
unsigned char *p = buf;
int ret = -1;
i2c_start(&mcu_i2c);
//send slave address
if(i2c_write(&mcu_i2c, ZLG7290_ADDRESS, 1)){
i2c_stop(&mcu_i2c);
return ret;
}
//send sub-address of slave
if(i2c_write(&mcu_i2c, addr, 1)){
i2c_stop(&mcu_i2c);
return ret;
}
i2c_stop(&mcu_i2c);
i2c_start(&mcu_i2c);
// send slave address (+1 read mode)
if(i2c_write(&mcu_i2c, ZLG7290_ADDRESS+1, 1)){
i2c_stop(&mcu_i2c);
return ret;
}
if(i2c_wait_slave(&mcu_i2c, 1000)){
i2c_stop(&mcu_i2c);
return ret;
}
i2c_read(&mcu_i2c, p++, 1); // send ack
i2c_stop(&mcu_i2c);
return 0;
}
/****************************************************************************
- 名称 :init_zlg7290
- 功能 : 音频模块的内部初始化
- 入口参数 :无
- 出口参数 :无
****************************************************************************/
void init_zlg7290(void)
{
mcu_i2c.sclk = PF0; //时钟PF脚
mcu_i2c.sdata = PF1; //数据PF脚
mcu_i2c.low_ns =3000; //低电平延时 ns
mcu_i2c.high_ns =3000; //高电平延时 ns
i2c_init(&mcu_i2c);
zlg7290_write(0x0d,0x04);
zlg7290_write(0x0c,0x00);
}
void LED_UP(unsigned char led_num,unsigned char flag) //led_num要点亮的LED灯,flag 1表示连着亮,0表示单亮
{
unsigned char i;
unsigned char tmp=0x80;
if(flag)
{
if(led_num==0)
{
zlg7290_write(0x12,0x00);
}
else
{
for(i=0;i<6-led_num;i++)
{
tmp = (tmp>>1)+0x80;
}
zlg7290_write(0x12,tmp);
}
}
else
{
zlg7290_write(0x12,0x02<
}
void LED_DOWN(unsigned char led_num,unsigned char flag) //led_num要点亮的LED灯,flag 1表示连着亮,0表示单亮
{
unsigned char i;
unsigned char tmp=0x80;
if(flag)
{
if(led_num==0)
{
zlg7290_write(0x10,0x00);
}
else
{
for(i=0;i<6-led_num;i++)
{
tmp = (tmp>>1)+0x80;
}
zlg7290_write(0x10,tmp);
}
}
else
{
zlg7290_write(0x10,0x02<
}
void LED_LEFT(unsigned char led_num,unsigned char flag) //led_num要点亮的LED灯,flag 1表示连着亮,0表示单亮
{
unsigned char i;
unsigned char tmp=0x80;
if(flag)
{
if(led_num==0)
{
zlg7290_write(0x11,0x00);
}
else
{
for(i=0;i<6-led_num;i++)
{
tmp = (tmp>>1)+0x80;
}
zlg7290_write(0x11,tmp);
}
}
else
{
zlg7290_write(0x11,0x02<
}
void LED_RIGHT(unsigned char led_num,unsigned char flag) //led_num要点亮的LED灯,flag 1表示连着亮,0表示单亮
{
unsigned char i;
unsigned char tmp=0x80;
if(flag)
{
if(led_num==0)
{
zlg7290_write(0x13,0x00);
}
else
{
for(i=0;i<6-led_num;i++)
{
tmp = (tmp>>1)+0x80;
}
zlg7290_write(0x13,tmp);
}
}
else
{
zlg7290_write(0x13,0x02<
}
void LED_CENTER(unsigned char x)
{
zlg7290_write(0x14,0x80>>x);
}