
ROS学习寄录之知识学习
1 ROS核心概念
1.1 节点(Node)
(1)执行具体任务的进程、独立运行的可执行文件
(2)不同节点可以使用不同的语言,可分布式运行在不同的主机
(3)节点在系统中的名称必须是唯一的
1.2 节点管理器(ROS Master)
(1)为节点提供命名和注册服务
(2)跟踪和记录话题/服务通信,辅助节点相互查找、建立连接
(3)提供参数服务器,节点使用此服务器存储和检索运行时的参数
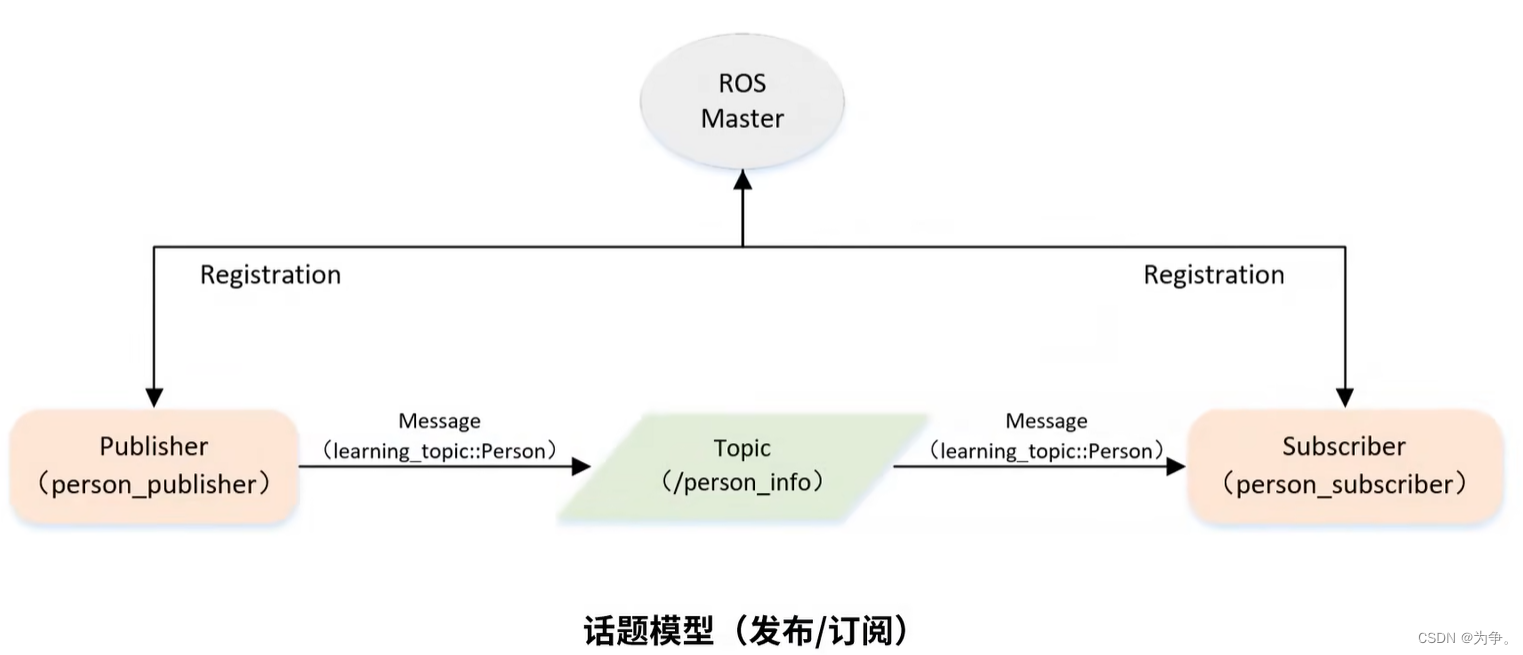
1.3话题(Topic)异步通信机制
(1)节点间用来传输数据的重要总线
(2)使用发布/订阅模型,数据由发布者传输到订阅者,同一个话题的订阅者或发布者可以不唯一
1.4消息(Message)话题数据
(1)具有一定的类型和数据结构,包括ROS提供的标准类型和用户自定义类型
(2)使用编程语言无关的.msg文件定义,编译过程中生成对应的代码文件
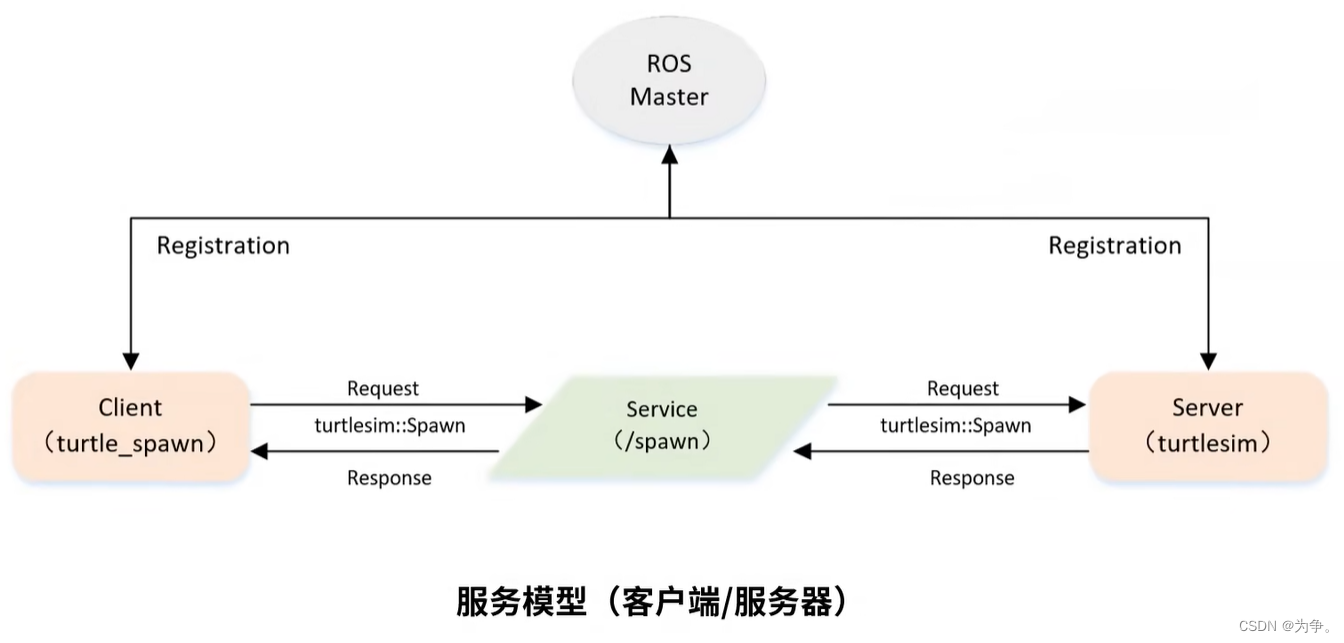
1.5服务(Service)同步通信机制
(1)使用客户端/服务器(C/S)模型,客户端发送请求数据,服务端完成处理后返回应答数据
(2)使用编程语言无关的.srv文件定义请求和应答数据结构,编译过程中生成对应的代码文件
1.6 参数(Parameter)全局共享字典
(1)可通过网络访问的共享、多变量字典
(2)字节使用此服务器来存储和检索运行时的参数
(3)适合存储静态、非二进制的配置参数,不适合存储动态配置的数据
2 ROS命令行工具
2.1 小海龟
启动ROS Master
roscore启动小海龟仿真器
rosrun turtlesim turtlesim_node启动海归控制节点
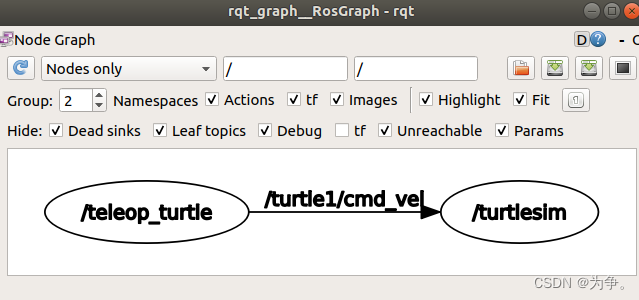
rosrun turtlesim turtle_teleop_key2.2 rqt基于qt的可视化工具
rqt_graph回车之后出现以下窗口,是以图形显示节点和消息之间的相关关系的工具
2.3 rosnode
2.3.1查看某一个节点的ping值
rosnode ping /节点名称2.3.2将系统中所有的节点都列出来
rosnode list2.3.3查看某一个节点的具体信息
rosnode info /节点名称2.3.4查看运行的机器名称
rosnode machine2.3.5杀死ros节点
rosnode kill2.4 rostopic
2.4.1打印系统中所有的话题列表
rostopic list2.4.2发布数据给某一个topic
rostopic pub /话题名 /话题消息类型例如小海龟
输入
rostopic pub /turtle1/cmd_vel 按下tab 按下tab出现以下情况,即可设置小海龟的速度和角度
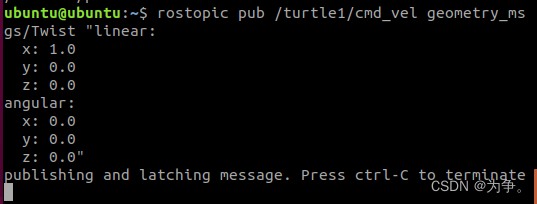
在速度x方向改为1之后,海归会前行一段距离即停下,因为执行后默认运行一次,此时需要在pub后加上-r +频率,例如加上-r 10 即以10Hz的频率执行,1s发布10次1m/s的指令
rostopic pub -r 10 /turtle1/cmd_vel 按下tab 按下tab2.5 rosmsg
查看数据结构,例如查看上一个小海龟的数据结构,show后边的是上边按两次tab出来的
rosmsg show geometru_msgs/Twist2.6 rosservice
2.6.1 查看所有service的内容
rosservice list2.6.2产生新的内容
例如小海龟中产生新的海归
rosservice call /spawn Tab然后更改x、y和名称
2.7 rosbag
记录ros中所有内容并保存下来
rosbag record -a -O cmd_record话题复现
rosbag play cmd_record.bag3 工作空间与功能包
3.1 工作空间
工作空间(workspace)是一个存放工程开发相关文件的文件夹
src:代码空间(Source Space)
build:编译空间(Build Space)
devel:开发空间(Development Space)
install:安装空间(Install Space)
3.2 建立过程
3.2.1创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace3.2.2编译工作空间
cd ~/catkin_ws/
catkin_make3.2.3产生install文件
catkin_make install3.2.4设置环境变量
source devel/setup.bash3.2.5检查环境变量
echo $ROS_PACKAGE_PATH3.3 创建功能包
3.3.1创建功能包
catkin_create_pkg
[depend1] [depend2] [depend3]
cd ~/catkin_ws/src
catkin_create_pkg test_pkg std_msgs rospy roscpp3.3.2编译功能包
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash4 发布者Publisher编程实现
通过编程使海龟动起来
4.1创建一个功能包并编译
cd ~/catkin_ws/src
catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim.
cd ..
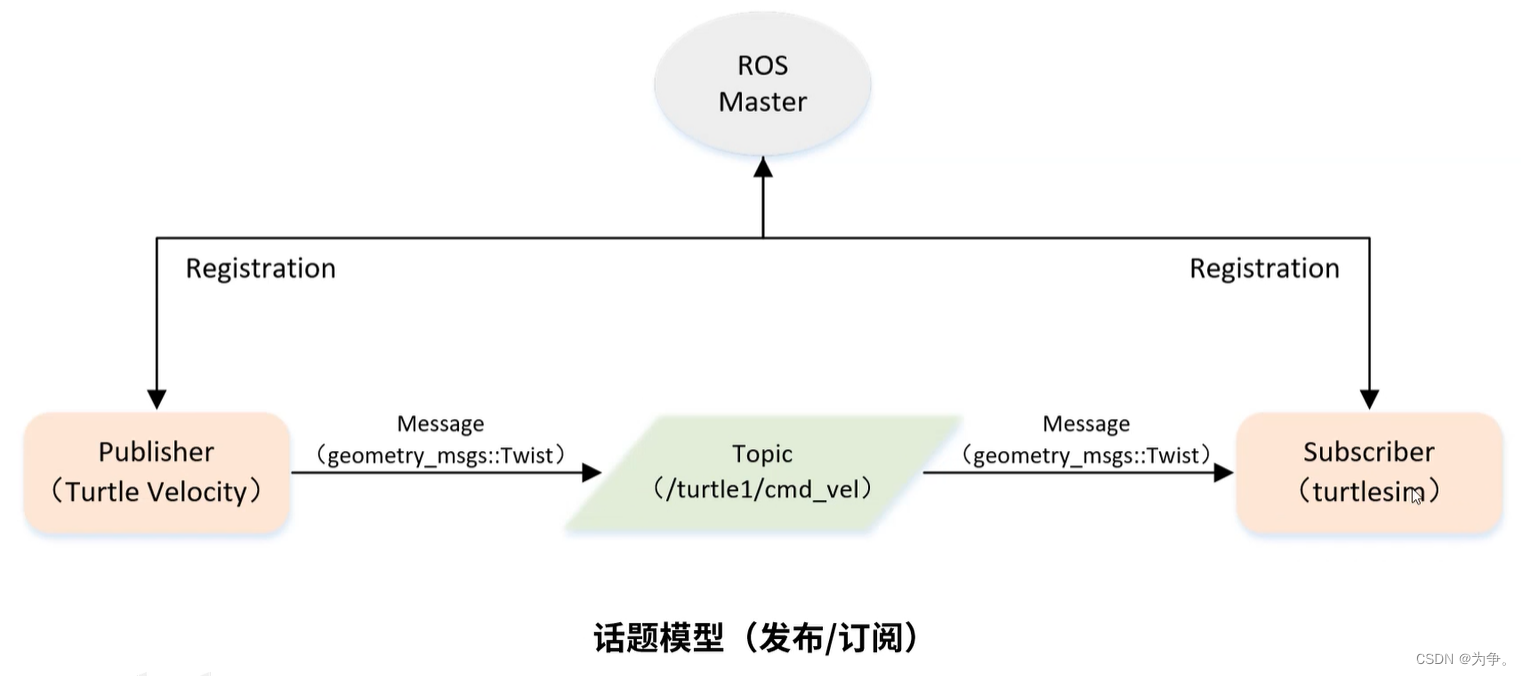
catkin_make4.2 如何实现一个发布者
(1)初始化ROS节点
(2)向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
(3)创建消息数据
(4)按照一定的频率循环发布信息
4.3代码实现
在创建的功能包learning_topic功能包中的src中创建一个cpp文件velocity_publisher.cpp
/*** 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist*/#include
#include int main(int argc, char **argv)
{// ROS节点初始化ros::init(argc, argv, "velocity_publisher");// 创建节点句柄ros::NodeHandle n;// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10ros::Publisher turtle_vel_pub = n.advertise("/turtle1/cmd_vel", 10);// 设置循环的频率ros::Rate loop_rate(10);int count = 0;while (ros::ok()){// 初始化geometry_msgs::Twist类型的消息geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.5;vel_msg.angular.z = 0.2;// 发布消息turtle_vel_pub.publish(vel_msg);ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]", vel_msg.linear.x, vel_msg.angular.z);// 按照循环频率延时loop_rate.sleep();}return 0;
} 添加CMakeLists.txt中编译规则
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})add_executable:将第二个位置的文件编译成第一个可执行文件
target_link_libraries:将ROS的可执行文件与ROS的库进行链接
编译并运行发布者
cd ~/catkin_ws
catkin_make
source devel/setup.bash
roscorerosrun turtlesim turtlesim_nodesource devel/setup.bash
rosrun learning_topic velocity_publisher5 订阅者Subscriber编程实现
使用订阅者定位海龟的位置信息
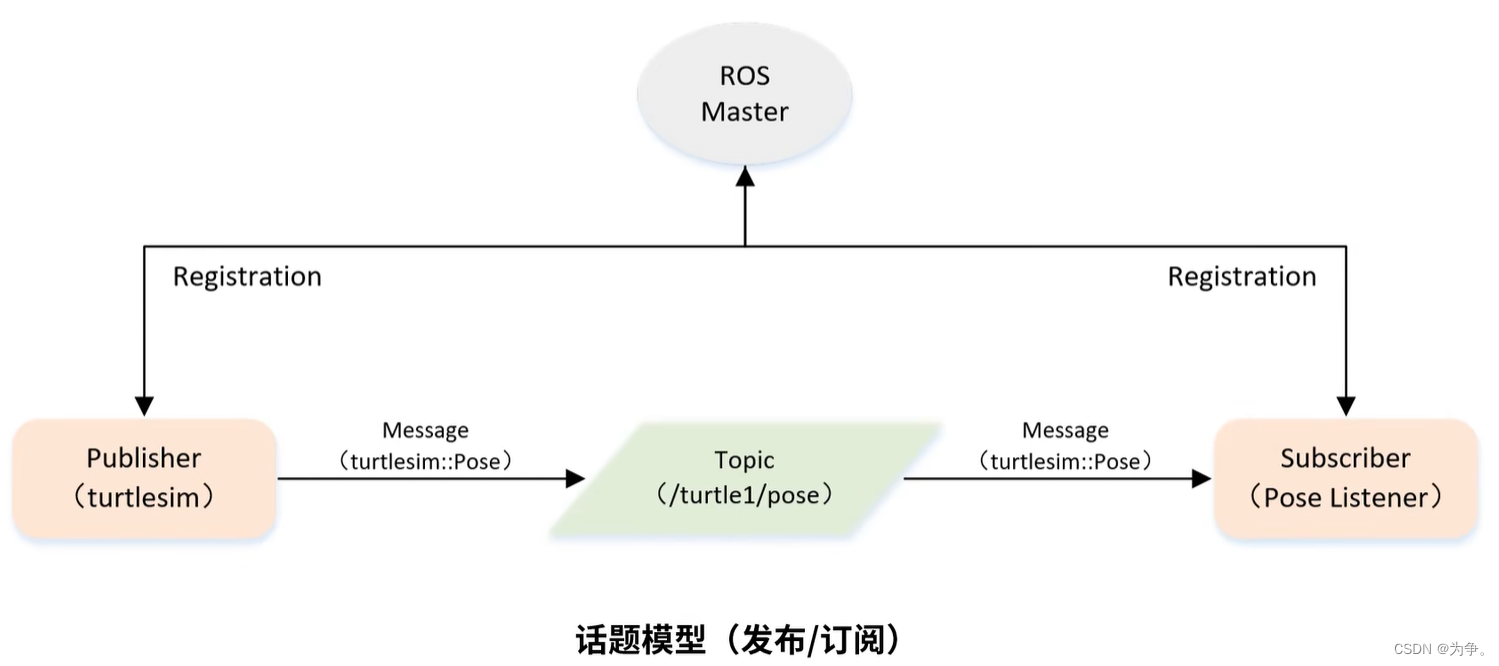
5.1 如何实现一个订阅者
(1)初始化ROS节点
(2)订阅需要的话题
(3)循环等待话题消息,接收到消息后进入回调函数
(4)在回调函数中完成消息处理
5.2 代码实现
/*** 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose*/#include
#include "turtlesim/Pose.h"// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{// 将接收到的消息打印出来ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "pose_subscriber");// 创建节点句柄ros::NodeHandle n;// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallbackros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);// 循环等待回调函数ros::spin();return 0;
} 添加CMakeLists.txt中编译规则
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})add_executable:将第二个位置的文件编译成第一个可执行文件
target_link_libraries:将ROS的可执行文件与ROS的库进行链接
编译并运行发布者
cd ~/catkin_ws
catkin_make
source devel/setup.bash
roscorerosrun turtlesim turtlesim_nodesource devel/setup.bash
rosrun learning_topic pose_subscriber6 话题消息的订阅和使用
传输一个名称、年龄等个人信息
6.1 如何自定义话题消息
(1)定义msg文件,即定义
(2)在package.xml中添加功能包依赖
message_generation
message_runtime (3)在CMakeLists.txt中增加编译选项
find_package(...... message_generation)add_message_files(FILES Person.msg)
generation_messages(DEPENDENCIES std_msgs)catkin_package(...... message_runtime)(4)编译生成语言相关文件
6.2 代码编写
(1)Person.msg文件
string name
uint8 sex
uint8 ageuint8 unknown
uint8 male=1
uint8 female=2(2)在package.xml中添加功能包依赖
message_generation
message_runtime (3)在CMakeLists.txt中增加编译选项
find_package(...... message_generation)add_message_files(FILES Person.msg)
generation_messages(DEPENDENCIES std_msgs)catkin_package(...... message_runtime)(4)代码
Person_publisher.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程将发布/person_info话题,自定义消息类型learning_topic::Person*/#include
#include "learning_topic/Person.h"int main(int argc, char **argv)
{// ROS节点初始化ros::init(argc, argv, "person_publisher");// 创建节点句柄ros::NodeHandle n;// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10ros::Publisher person_info_pub = n.advertise("/person_info", 10);// 设置循环的频率ros::Rate loop_rate(1);int count = 0;while (ros::ok()){// 初始化learning_topic::Person类型的消息learning_topic::Person person_msg;person_msg.name = "Tom";person_msg.age = 18;person_msg.sex = learning_topic::Person::male;// 发布消息person_info_pub.publish(person_msg);ROS_INFO("Publish Person Info: name:%s age:%d sex:%d", person_msg.name.c_str(), person_msg.age, person_msg.sex);// 按照循环频率延时loop_rate.sleep();}return 0;
} Person_subscriber.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person*/#include
#include "learning_topic/Person.h"// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_topic::Person::ConstPtr& msg)
{// 将接收到的消息打印出来ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d", msg->name.c_str(), msg->age, msg->sex);
}int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "person_subscriber");// 创建节点句柄ros::NodeHandle n;// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallbackros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);// 循环等待回调函数ros::spin();return 0;
} 在CMakeLists.txt中增加代码
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
编译代码
cd ~/catkin_ws
catkin_make
source devel/setup.bash
roscorecd ~/catkin_ws
source devel/setup.bash
rosrun learning_topic person_subscribercd ~/catkin_ws
source devel/setup.bash
rosrun learning_topic person_publisher7 客户端Client的编程实现
7.1 如何实现一个客户端
(1)初始化ROS节点
(2)创建一个Client实例
(3)发布服务请求数据
(4)等待Server处理之后的应答结果
7.2 代码实现
(1)创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
(2)turtle_spawn.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn*/#include
#include "turtlesim/Spawn.h"int main(int argc, char** argv)
{// 初始化ROS节点ros::init(argc, argv, "turtle_spawn");// 创建节点句柄ros::NodeHandle node;// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的serviceros::service::waitForService("/spawn");ros::ServiceClient add_turtle = node.serviceClient("/spawn");// 初始化turtlesim::Spawn的请求数据turtlesim::Spawn srv;srv.request.x = 2.0;srv.request.y = 2.0;srv.request.name = "turtle2";// 请求服务调用ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]", srv.request.x, srv.request.y, srv.request.name.c_str());add_turtle.call(srv);// 显示服务调用结果ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());return 0;
}; (3)CMakeLists.txt增加代码
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})(4)编译
cd ~/catkin_ws
catkin_make
source devel/setup.bash
roscorecd ~/catkin_ws
source devel/setup.bash
rosrun turtlesim turtlesim_nodecd ~/catkin_ws
source devel/setup.bash
rosrun learning_service turtle_spawn
上一篇:JavaScript学习
下一篇:myeclipse运行Web项目