
实验四、最少拍控制算法matlab仿真实验
实验四、最少拍控制算法matlab仿真实验
一、实验目的
1.掌握最少拍有纹波、无纹波系统的设计方法;
2.学会最少拍控制系统的分析方法;
3.了解输入信号对最少拍控制系统的影响及改进措施
二、实验工具
MATLAB 软件( 2022a)
三、实验要求
1、写出广义被控对象的脉冲传递函数G(z)。并求出广义被控对象的差分方程形式。
2、画出未加控制器时系统的单位阶跃响应图,分析系统是否稳定?若稳定,求稳态误差。
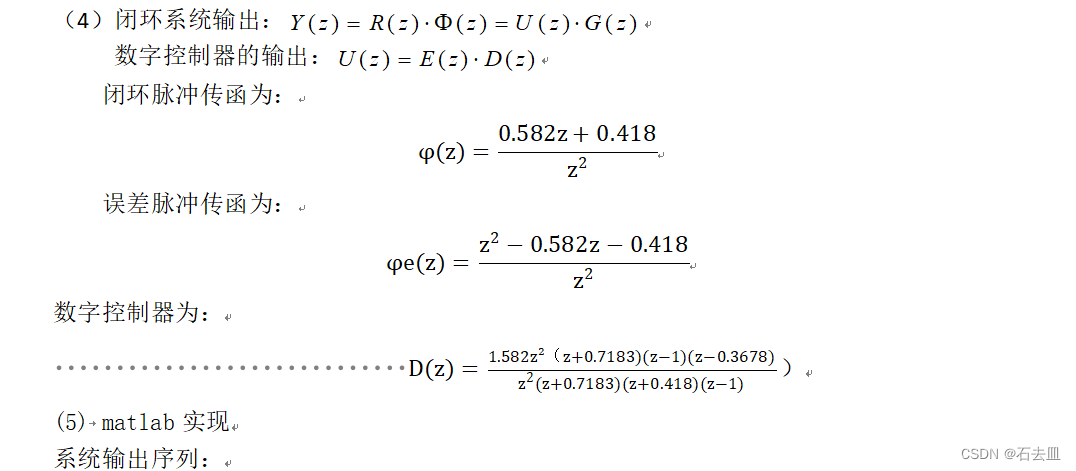
3、根据最少拍设计步骤,写出针对单位阶跃输入时的闭环脉冲传递函数![]() 和误差脉冲脉冲传递函数1-
和误差脉冲脉冲传递函数1-![]() 。给出设计出的最少拍控制器的脉冲传递函数D(z)。并求出最少拍控制器的差分方程形式。
。给出设计出的最少拍控制器的脉冲传递函数D(z)。并求出最少拍控制器的差分方程形式。
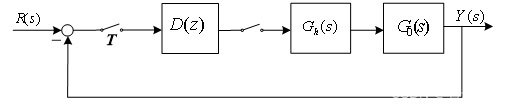
4、画出串上最少拍控制器后的数字控制系统框图。
5、将上述所求的最少拍控制器代入系统,画出系统在单位阶跃输入信号作用下的响应图,以及数字控制器的控制量变化曲线。分析加入控制器后系统能否达到最少拍控制的要求。给出系统输出序列和控制器输出序列,并求出调节时间,讨论输出是否存在纹波。
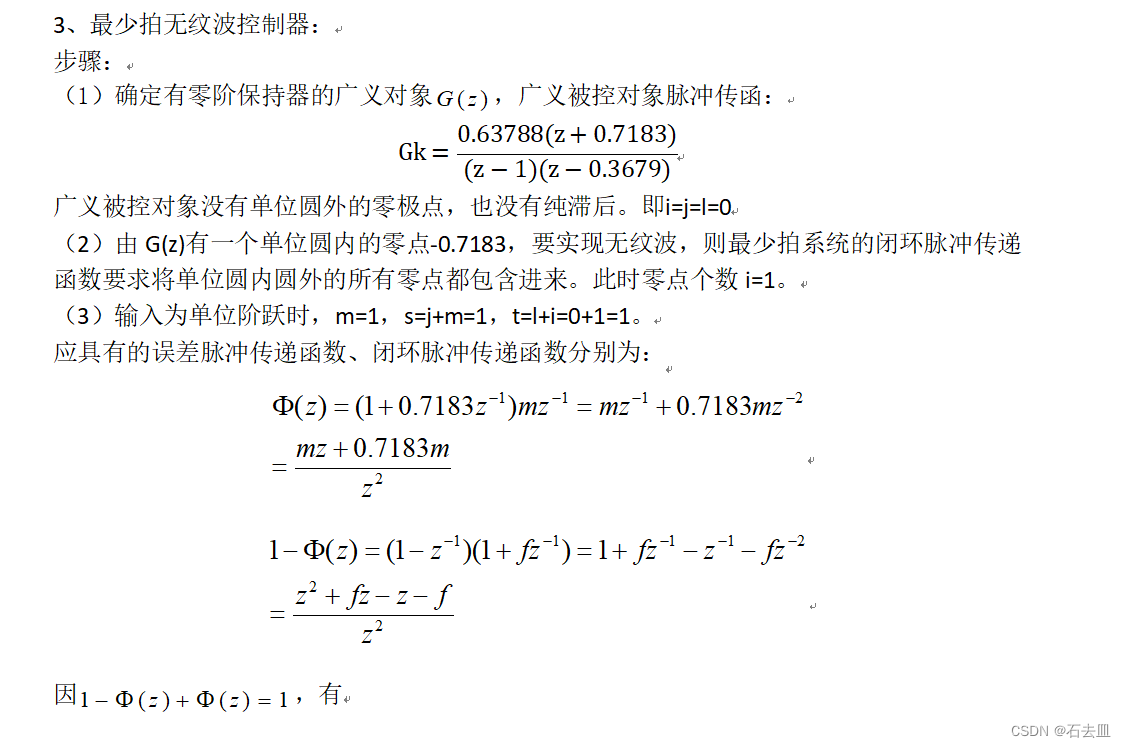
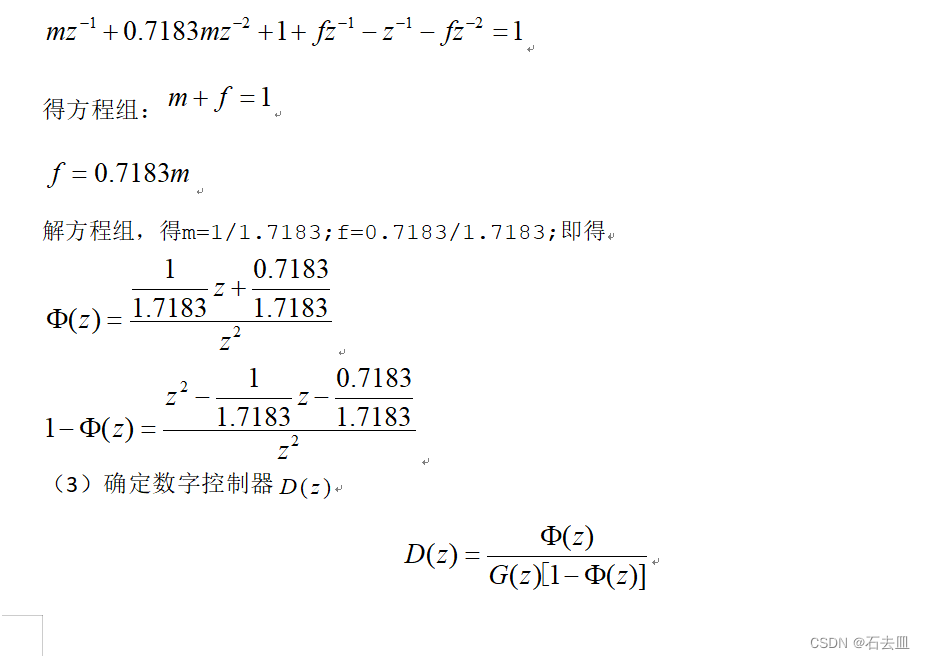
6、若存在纹波,请设计最少拍无纹波控制器,并给出串上最少拍无纹波控制器后的闭环脉冲传递函数![]() 和误差脉冲脉冲传递函数1-
和误差脉冲脉冲传递函数1-![]() 。最少拍无纹波控制器的脉冲传递函数D(z)。
。最少拍无纹波控制器的脉冲传递函数D(z)。
7、将得到的最少拍无纹波控制器代入系统,画出系统在单位阶跃输入信号作用下的响应图,以及数字控制器的控制量变化曲线。给出系统输出序列和控制器输出序列,分析加入最少拍无纹波控制器后系统能否达到消除纹波的目的。为消除纹波,调节时间变为多少。
8、写出针对单位斜坡信号输入时的闭环脉冲传递函数![]() 和误差脉冲脉冲传递函数1-
和误差脉冲脉冲传递函数1-![]() 。给出设计出的最少拍控制器的脉冲传递函数D(z)
。给出设计出的最少拍控制器的脉冲传递函数D(z)
四、实验内容
设单位反馈线性定常系统的连续部分和零阶保持器的传递函数分别为:
 ,
,
,采样周期T=1秒。要求系统在单位阶跃输入时实现最少拍控制,求数字控制器的脉冲传递函数![]() 。讨论加上控制器后的系统输出在采样点之间是否存在纹波,若存在纹波,请设计最少拍无纹波控制器。系统结构如图:
。讨论加上控制器后的系统输出在采样点之间是否存在纹波,若存在纹波,请设计最少拍无纹波控制器。系统结构如图:
- 对未加控制器时的闭环系统分析其是否满足最少拍要求
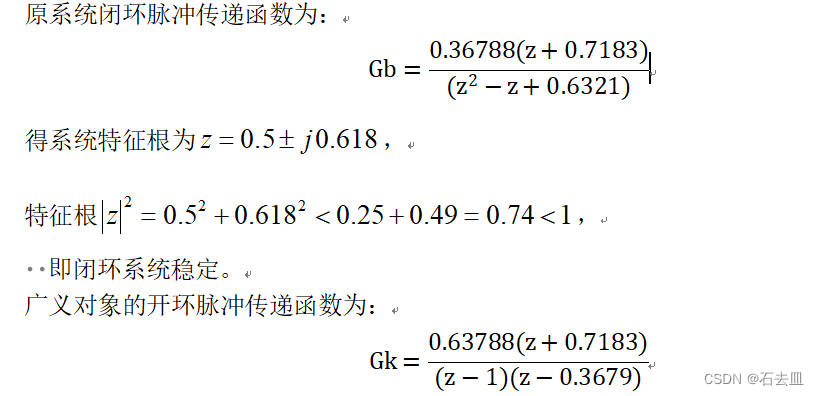
由开环传递函数可知,开环脉冲传递函数有z=1的极点个数为1,系统为I型系统。
对于单位速度输入,稳态误差不为零。
即原来的闭环系统达不到最少拍系统中对某个输入稳定无静差的要求。
(3)通过matlab对函数进行绘制并得到具体的输出序列进行对比得到准确的结果。
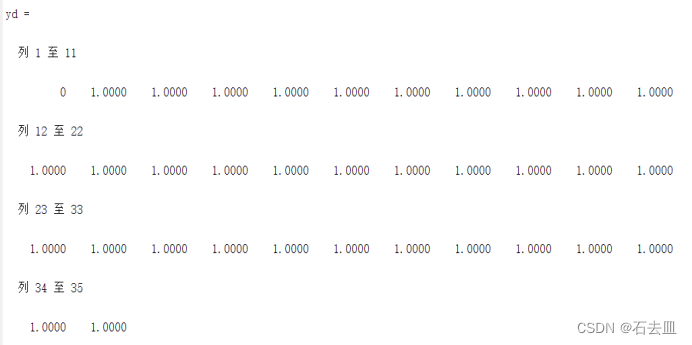
原闭环系统输出序列为:
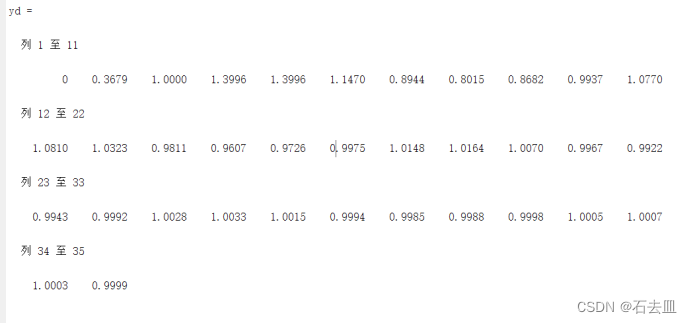
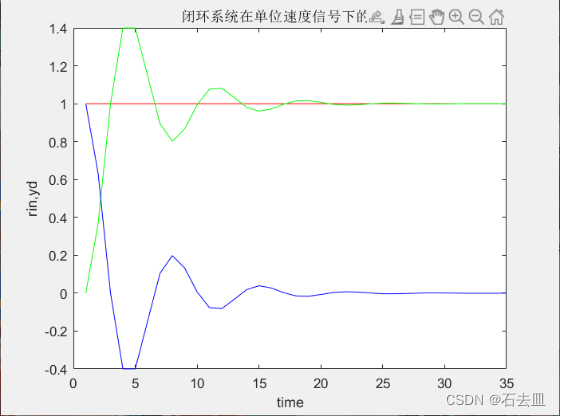
可知,系统输出在第十三拍以后,基本稳定为1,满足稳定性要求。调节时间为13s。动态过程为13拍,达不到最少怕的要求。
原闭环系统偏差序列为:
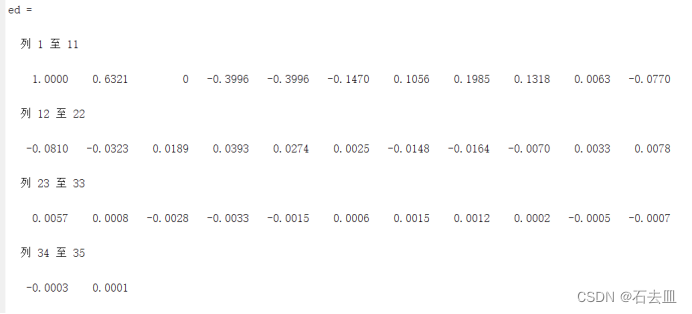
可知,系统偏差输出在第十三拍(系统稳定)以后,基本保持0大小,无静差。
所以可以从程序输出的内容分析可看出,原系统不满足最少拍要求。需要串入最少拍调节器。
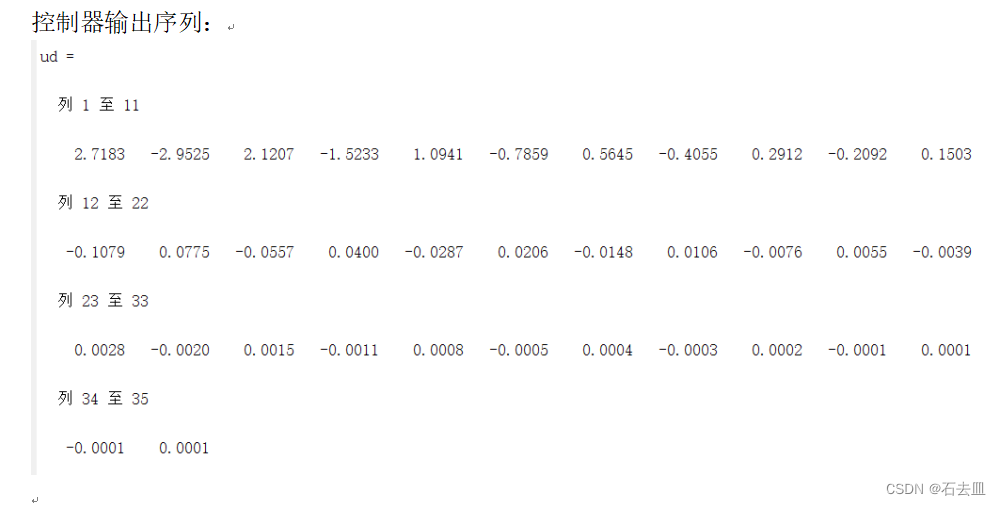
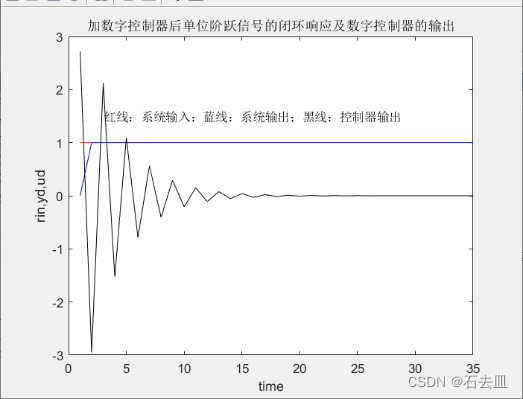
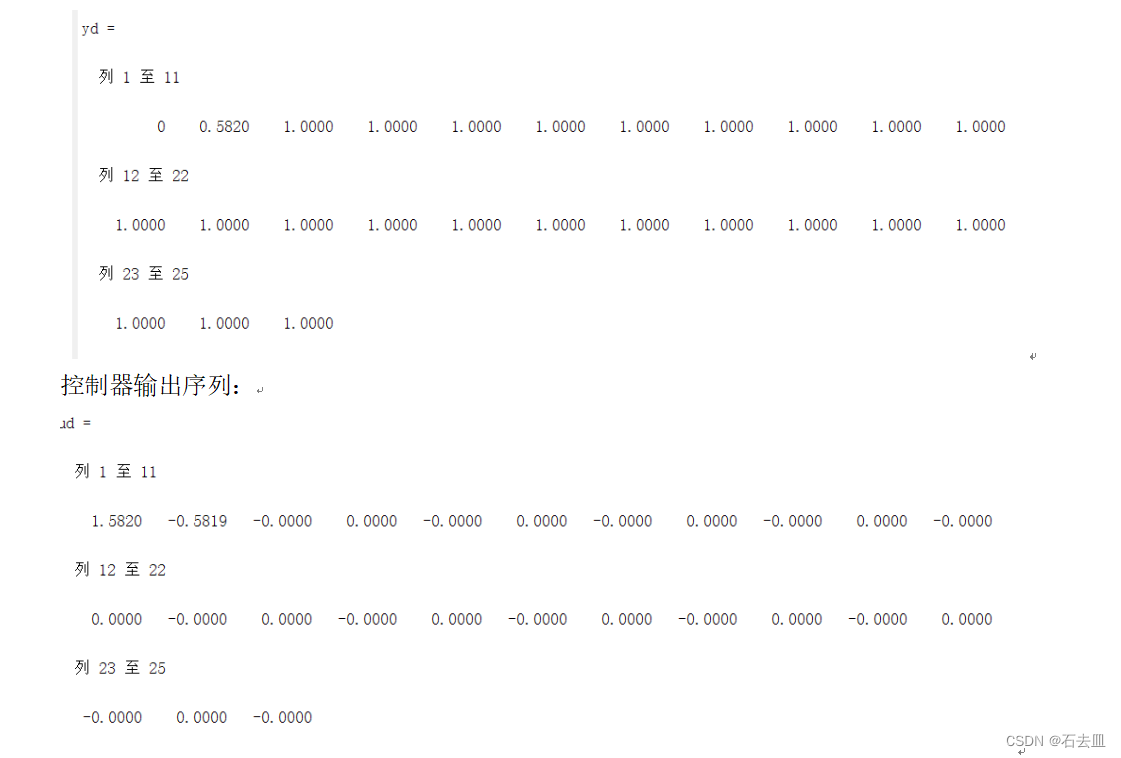
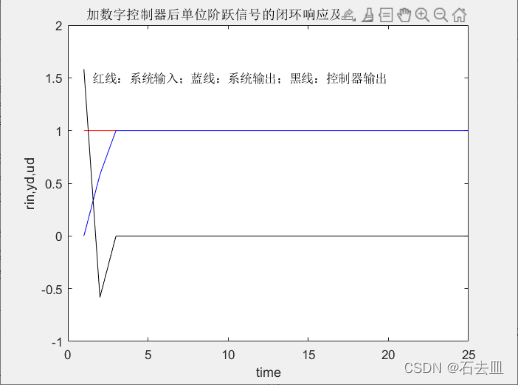
可知,加数字控制器后,系统输出与系统输入在1s以后相等,说明系统是稳定的且稳态无静差。调节时间为1s,但观察其数字控制器输出曲线及输出序列发现,其控制器输出在28拍(28s)后才变为恒定值,说明输出在第3拍至第28拍间,仅能保证在采样点上与输入相同,在采样点间不相同,即输出有纹波。
可以看出,此时调节时间变为2s,调节时间比原来延长1拍,但其控制器输出也在2拍后变为恒定值,可以保证2拍后,输出不仅在采样点上与输入相同,还在采样点间保证相同,实现输出无纹波。
五、实验思考
1. 最少拍受什么限制而使调整节拍增加?
答:调整节拍增加最少拍受输入函数R(z)的阶数限制。R(z)的阶数越高,调整时间越长。
2.分析不同输入信号对最少拍控制系统的影响。
答:与输入信号有关。输入信号的阶数越高,其调整时间越长。
3.无纹波系统对控制器有何要求。
答:有两个要求。
第一,被控对象G(s)要有足够的的积分环节,第二,D(z) 必须包含G(z)中的圆内圆外的全部零点N(z);
六、代码汇总
对未加控制器时的闭环系统分析其是否满足最少拍要求
- clear;
- clc;
- G=zpk([],[0,-1],1); %零极点形式的被控对象
- T=1; %采样周期
- Gd=c2d(G,T,'zoh') %广义被控对象脉冲传函
- [num1,den1]=tfdata(Gd,'v');
- GG=feedback(Gd,1) %原系统闭环传递函数
- yd_1=0;yd_2=0;
- ed_1=0;ed_2=0;
- for k=1:1:35
- time(k)=k*T;
- rin(k)=1; %单位阶跃信号
- %闭环系统的差分方程
- yd(k)=num1(2)*ed_1+num1(3)*ed_2-den1(2)*yd_1-den1(3)*yd_2;
- ed(k)=rin(k)-yd(k); %求偏差
- %数据更新
- ed_2=ed_1;ed_1=ed(k);
- yd_2=yd_1;yd_1=yd(k);
- end
- yd %原闭环系统的输出序列
- ed %原闭环系统的偏差序列
- figure(1);
- plot(time,rin,'r',time,yd,'g',time,ed,'b');
- xlabel('time');
- ylabel('rin,yd');
- title('闭环系统在单位速度信号下的响应');
- text(3,23,'红线:输入信号;绿线:系统输出响应;蓝线:偏差');
- %-------------------------------设计最少拍控制器 -------------------------------
- clear all;
- clc;
- G=zpk([],[0,-1],1); %零极点形式的被控对象
- T=1; %采样周期
- Gd=c2d(G,T,'zoh'); %广义被控对象脉冲传函
- phi=tf([1],[1 0],T); %闭环脉冲传函
- phie=tf([1 -1],[1 0],T); %误差脉冲传函
- D=phi/(Gd*phie); %数字控制器脉冲传函D(z)
- phie,phi,Gd,D
- [num1,den1]=tfdata(Gd,'v');
- [num2,den2]=tfdata(D,'v');
- ud_1=0;ud_2=0;ud_3=0;
- yd_1=0;yd_2=0;
- ed_1=0;ed_2=0;ed_3=0;
- for k=1:1:35
- time(k)=k*T;
- rin(k)=1; %单位阶跃信号
- %加数字控制器的差分方程
- yd(k)=num1(2)*ud_1+num1(3)*ud_2-den1(2)*yd_1-den1(3)*yd_2;
- ed(k)=rin(k)-yd(k); %求偏差
- %数字控制器的差分方程
- ud(k)=(num2(1)*ed(k)+num2(2)*ed_1+num2(3)*ed_2+num2(4)*ed_3-den2(2)*ud_1-den2(3)*ud_2-den2(4)*ud_3)/den2(1);
- %数据更新
- ud_3=ud_2;ud_2=ud_1;ud_1=ud(k);
- ed_3=ed_2;ed_2=ed_1;ed_1=ed(k);
- yd_2=yd_1;yd_1=yd(k);
- end
- yd,ud
- figure(2);
- plot(time,rin,'r',time,yd,'b',time,ud,'k');
- xlabel('time');
- ylabel('rin,yd,ud');
- title('加数字控制器后单位阶跃信号的闭环响应及数字控制器的输出');
- text(3,1.5,'红线:系统输入;蓝线:系统输出;黑线:控制器输出');
- %-------------------------无纹波控制器设计-------------------------------
- clear all;
- close all;
- clc;
- G=zpk([],[0,-1],1); %%零极点形式的被控对象
- T=1; %采样周期
- Gd=c2d(G,T,'zoh'); %广义被控对象脉冲传函
- %求误差脉冲传函及闭环脉冲传函
- phi=tf([1/1.7183 0.7183/1.7183],[1 0 0],T); %闭环脉冲传函
- phie=tf([1 -1/1.7183 -0.7183/1.7183],[1 0 0],T); %误差脉冲传函
- D=phi/(Gd*phie); %数字控制器脉冲传函D(z)
- Gd,D,phie,phi
- [num1,den1]=tfdata(Gd,'v');%求脉冲传函的分子分母多项式
- [num2,den2]=tfdata(D,'v');
- ud_1=0;ud_2=0;ud_3=0;ud_4=0;ud_5=0;
- yd_1=0;yd_2=0;
- ed_1=0;ed_2=0;ed_3=0;ed_4=0;ed_5=0;
- for k=1:1:25
- time(k)=k*T;
- rin(k)=1; %单位阶跃信号
- %加数字控制器的差分方程
- yd(k)=num1(2)*ud_1+num1(3)*ud_2-den1(2)*yd_1-den1(3)*yd_2;
- ed(k)=rin(k)-yd(k);
- %数字控制器的差分方程
- ud(k)=(num2(1)*ed(k)+num2(2)*ed_1+num2(3)*ed_2+num2(4)*ed_3+num2(5)*ed_4+num2(6)*ed_5-den2(2)*ud_1-den2(3)*ud_2-den2(4)*ud_3-den2(5)*ud_4-den2(6)*ud_5)/den2(1);
- ud_5=ud_4;ud_4=ud_3;ud_3=ud_2;ud_2=ud_1;ud_1=ud(k);
- ed_5=ed_4;ed_4=ed_3;ed_3=ed_2;ed_2=ed_1;ed_1=ed(k);
- yd_2=yd_1;yd_1=yd(k);
- end
- yd,ud
- figure(1);
- plot(time,rin,'r',time,yd,'b',time,ud,'k');
- xlabel('time');
- ylabel('rin,yd,ud');
- title('加数字控制器后单位阶跃信号的闭环响应及数字控制器的输出');
- text(1.5,1.5,'红线:系统输入;蓝线:系统输出;黑线:控制器输出');