
厘米级观测!我国成功突破这一技术瓶颈
创始人
2025-09-21 17:07:27
0次
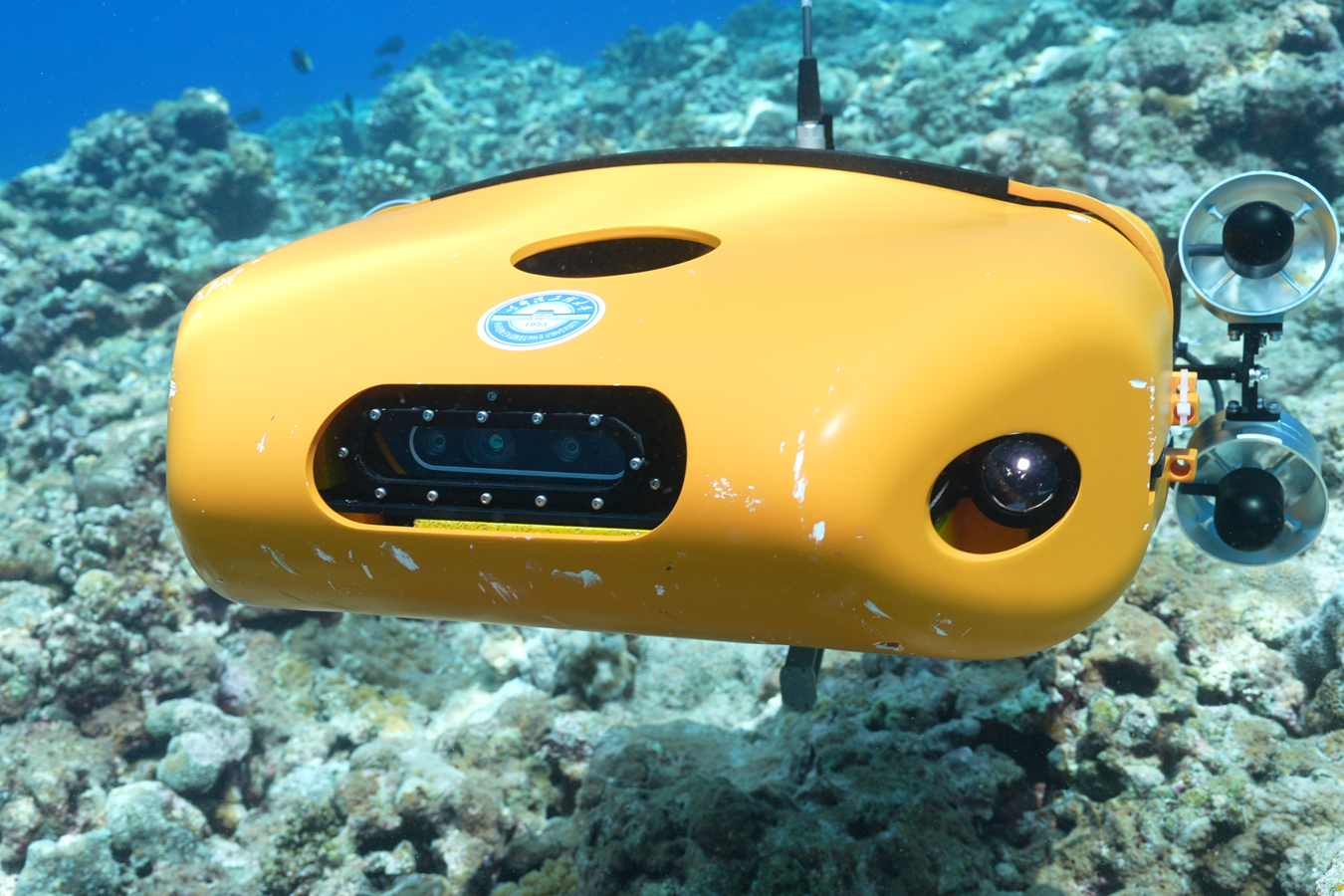
近日,在南海的晨光中
一台直径约70厘米的水下机器人
以优雅的弧线潜入碧波
这是哈尔滨工程大学船舶与工程学院
王刚教授团队研发的
敏捷型水下机器人“海龟”
的真实工作场景
它不仅实现了
近海底环境观测的厘米级突破
更以灵动身姿颠覆了传统水下机器人
“笨拙”“僵硬”的刻板印象
开启一个更加精准、高效、环保的
水下探测新时代
“我们发现海龟倾斜拍动前肢
的推进方式既能减少水体扰动
又能保持高效推进”
团队成员刘开鑫回忆
经历了无数次失败后
团队推导出了
机器人低扰动航行性能与推进器布局
以及机器人外形参数之间的数学公式
极大地提高了研发效率
对比试验中
“海龟”机器人凭借其
精准布局的推进器
在航行时几乎不泛起涟漪
将沉积物干扰降低了90%
为了让机器人学会瞬时感知
以确保在贴底航行时不会触底发生意外
团队提出了“三点惯性测量感知方法”
使机器人数据噪声降低约76.2%
响应时间缩短1.1倍
倾角控制的稳定性提升7.16倍
经过持续攻关
团队成功在跟踪算法中
引入了姿态约束算法
大大提高了机器人的敏捷性
“海龟”机器人360度的灵活运动
成功突破了水下航行器在海底复杂地形
全域机动的技术瓶颈
不仅能用于观测珊瑚
还能在水下捕捞、搜救等方面
发挥重要作用
相关内容
热门资讯
我来教大家“小南长牌辅助器ap...
您好,小南长牌这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中打...
我来教大家“奥云桓仁麻将辅助器...
您好,奥云桓仁麻将这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏...
我来教大家“亿游十三道辅助器a...
我来教大家“亿游十三道辅助器app官方下载最新版本更新”详细分享开挂一、亿游十三道AI软件牌型概率发...
我来教大家“广客麻将辅助器ap...
亲,广客麻将这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,广客麻将的开挂软件,名...
我来教大家“琼雀海南麻将辅助器...
我来教大家“琼雀海南麻将辅助器app官方下载最新版本更新”详细分享开挂一、琼雀海南麻将AI软件牌型概...
我来教大家“决战武汉麻将辅助器...
我来教大家“决战武汉麻将辅助器app官方下载最新版本更新”详细分享开挂1、让任何用户在无需AI插件第...
我来教大家“元来黄冈麻将辅助器...
我来教大家“元来黄冈麻将辅助器app官方下载最新版本更新”详细分享开挂一、元来黄冈麻将AI软件牌型概...
我来教大家“黄山麻将辅助器ap...
我来教大家“黄山麻将辅助器app官方下载最新版本更新”详细分享开挂一、黄山麻将AI软件牌型概率发牌机...
我来教大家“熊猫互娱辅助器ap...
亲,熊猫互娱这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,熊猫互娱的开挂软件,名...
我来教大家“济宁九州麻将辅助器...
您好,济宁九州麻将这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏...
我来教大家“欢乐卡五星辅助器a...
我来教大家“欢乐卡五星辅助器app官方下载最新版本更新”详细分享开挂一、欢乐卡五星AI软件牌型概率发...
我来教大家“微乐天津麻将辅助器...
我来教大家“微乐天津麻将辅助器app官方下载最新版本更新”详细分享开挂1、让任何用户在无需AI插件第...
我来教大家“贵州棋牌辅助器ap...
亲,贵州棋牌这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,贵州棋牌的开挂软件,名...
我来教大家“友聚麻将辅助器ap...
您好,友聚麻将这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中打...
我来教大家“尊龙凯时辅助器ap...
我来教大家“尊龙凯时辅助器app官方下载最新版本更新”详细分享开挂一、尊龙凯时AI软件牌型概率发牌机...
我来教大家“牌乐门辅助器app...
您好,牌乐门这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中打牌...
我来教大家“好友跑得快辅助器a...
您好,好友跑得快这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中...
我来教大家“姚记大联盟辅助器a...
我来教大家“姚记大联盟辅助器app官方下载最新版本更新”详细分享开挂一、姚记大联盟AI软件牌型概率发...
我来教大家“诸暨游戏辅助器ap...
您好,诸暨游戏这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中打...
我来教大家“豪门国际辅助器ap...
我来教大家“豪门国际辅助器app官方下载最新版本更新”详细分享开挂1、让任何用户在无需AI插件第三方...