
【Paper】2020_离散多智能体系统的事件触发二分一致性研究_刘雨欣
文章目录
- 第 4 章 有向符号图下离散多智能体系统的事件触发二分一致性
- 4.3.1 示例一
- 4.3.2 示例二
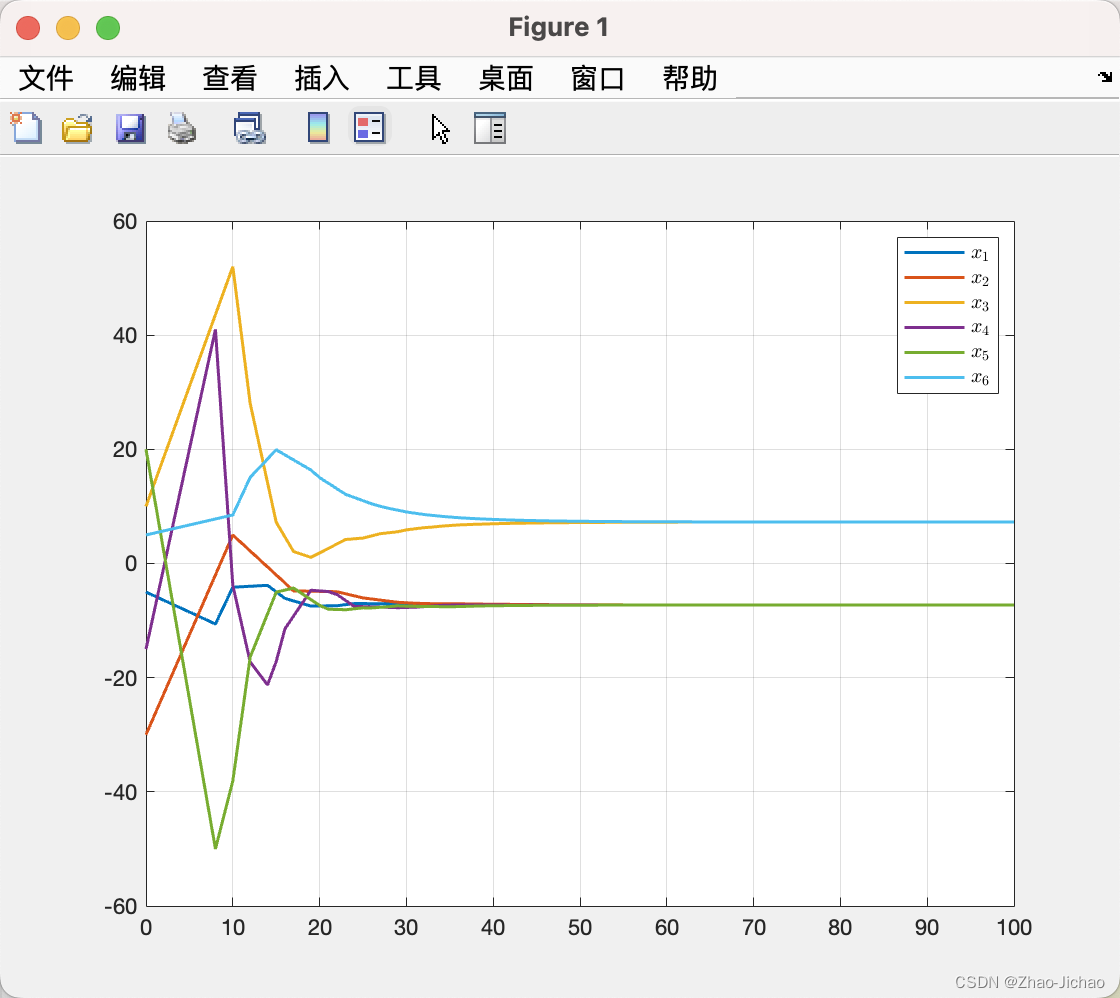
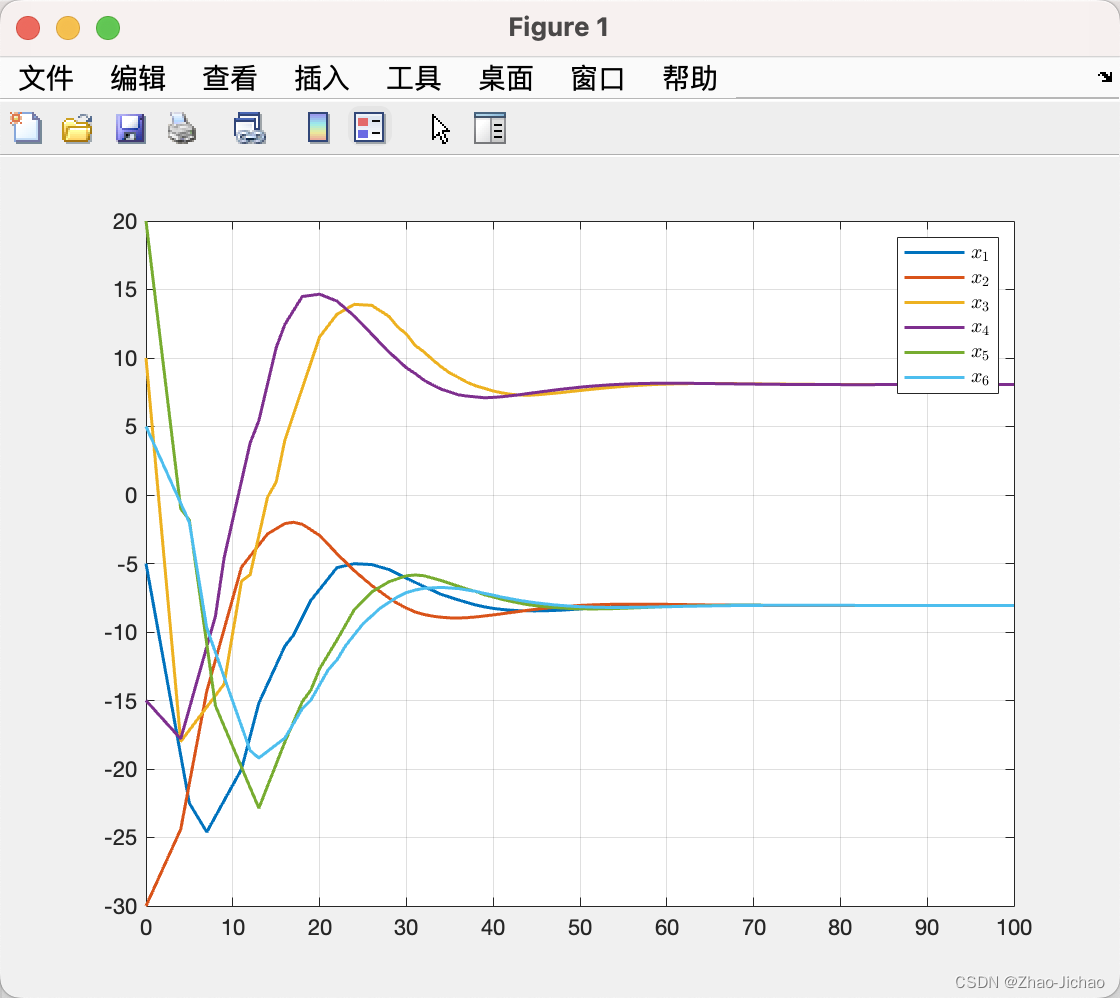
系统 动态方程、控制输入及事件触发条件分别如式(2.1)、(3.1)及式(3.6)所示。
本文考虑一阶离散多智能体系统,第 iii 个智能体的动态方程如下:
xi(k+1)=xi(k)+ui(k)(2.1)\begin{aligned} x_i (k+1) &= x_i (k) + u_i (k) \end{aligned}\tag{2.1}xi(k+1)=xi(k)+ui(k)(2.1)
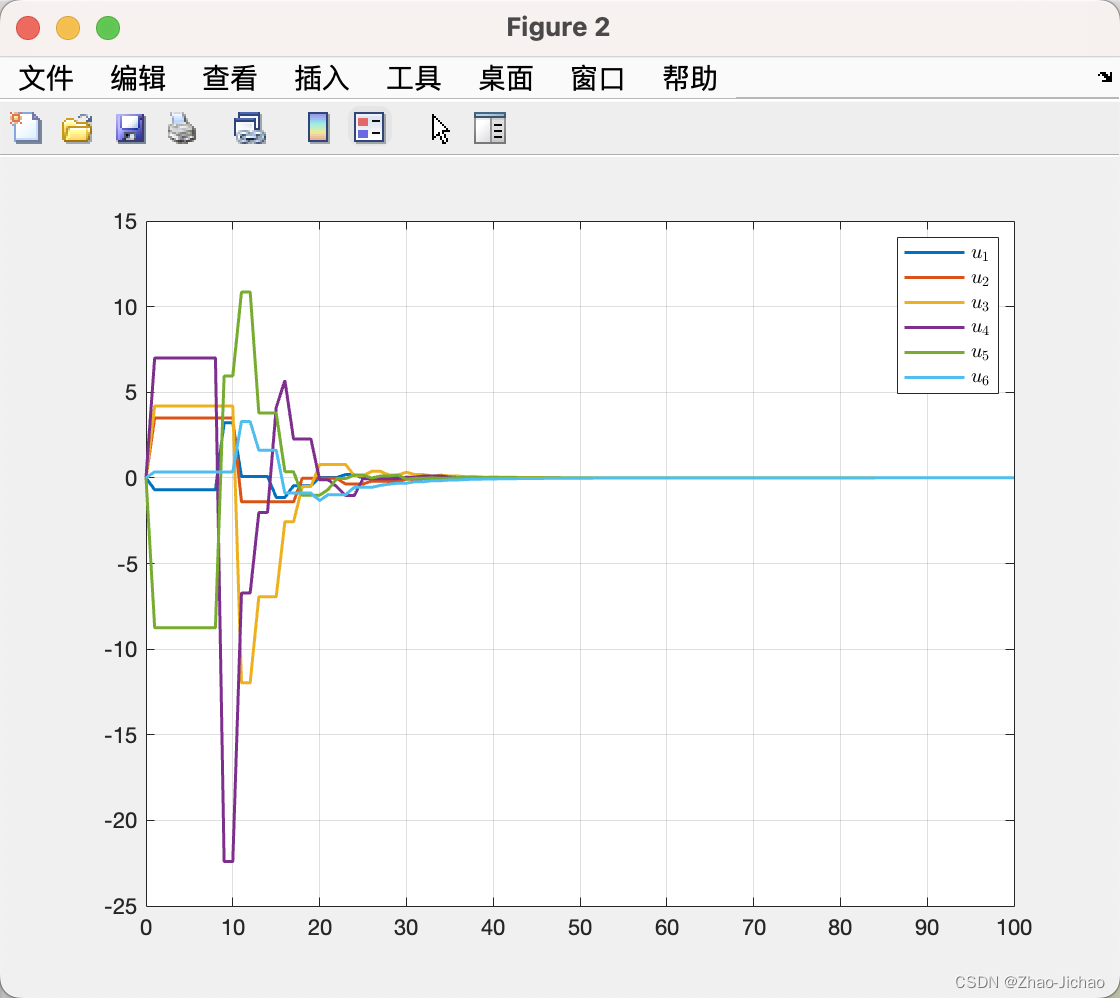
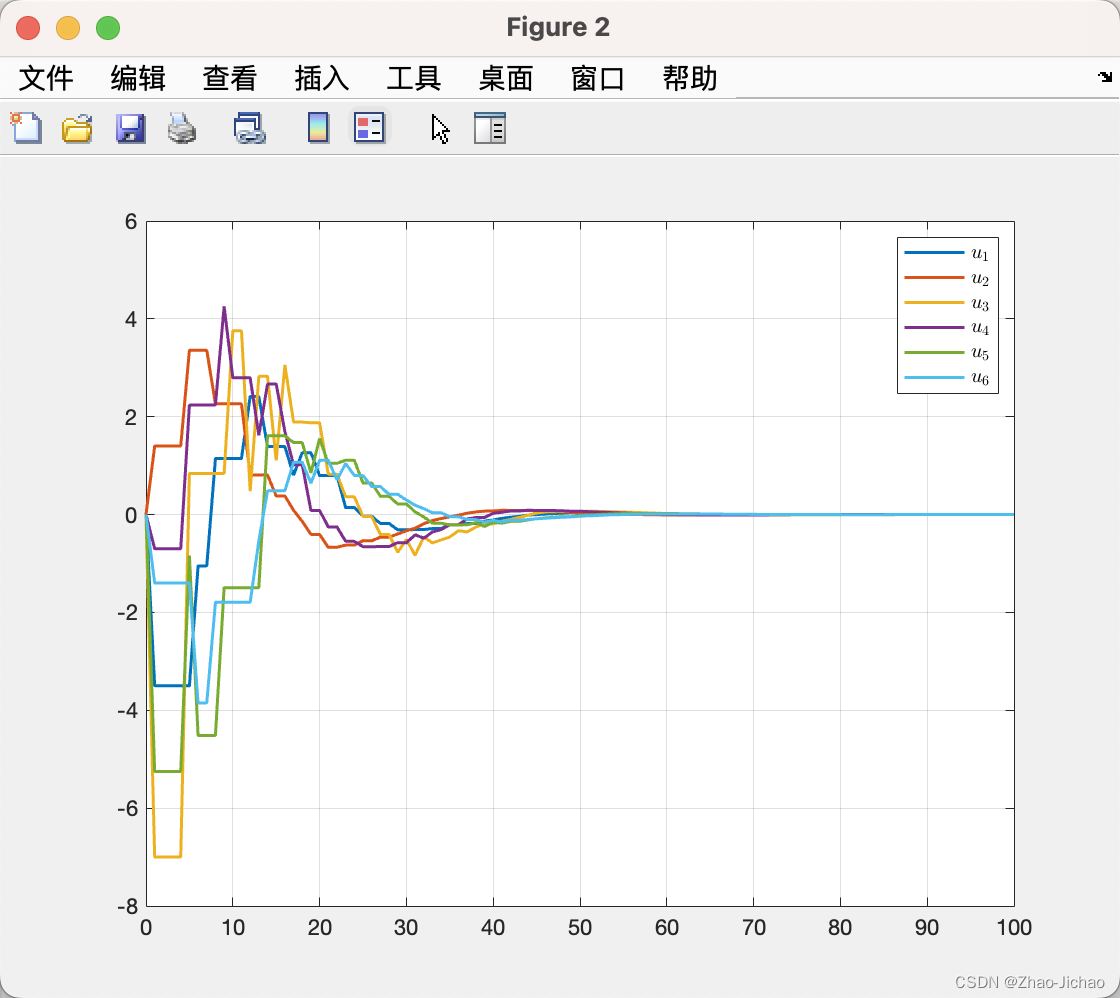
基于文献 [48] 中给出的连续型二分一致性控制输入,我们给出事件触发二分一 致性控制输入,如下:
ui(k)=−ϵ∑j∈Niin∣aij∣[x^i(k)−sign(aij)x^j(k)](3.1)\begin{aligned} u_i (k) &= -\epsilon \sum_{j \in N_i^{in}} |a_{ij}| [\hat{x}_i(k) - \text{sign}(a_{ij}) \hat{x}_j(k)] \end{aligned}\tag{3.1}ui(k)=−ϵj∈Niin∑∣aij∣[x^i(k)−sign(aij)x^j(k)](3.1)
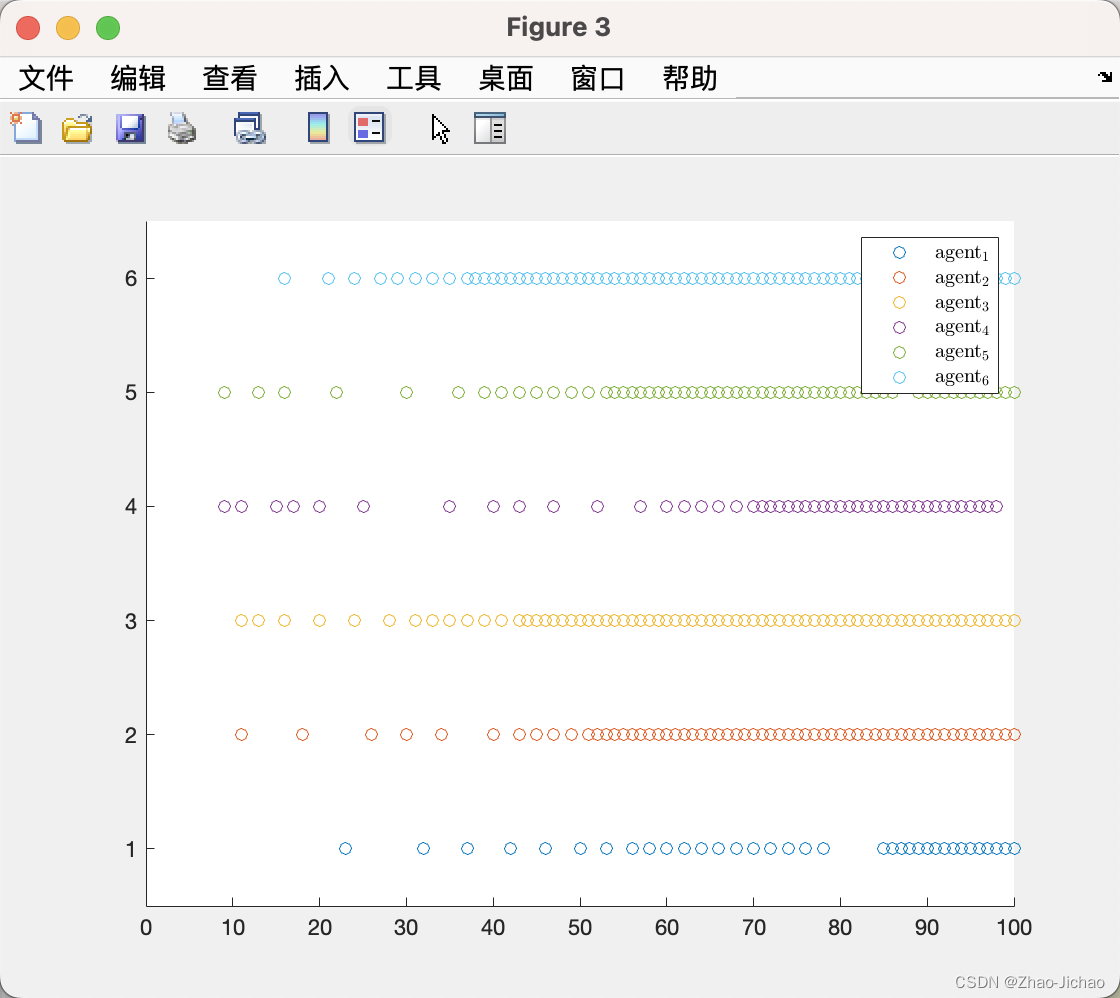
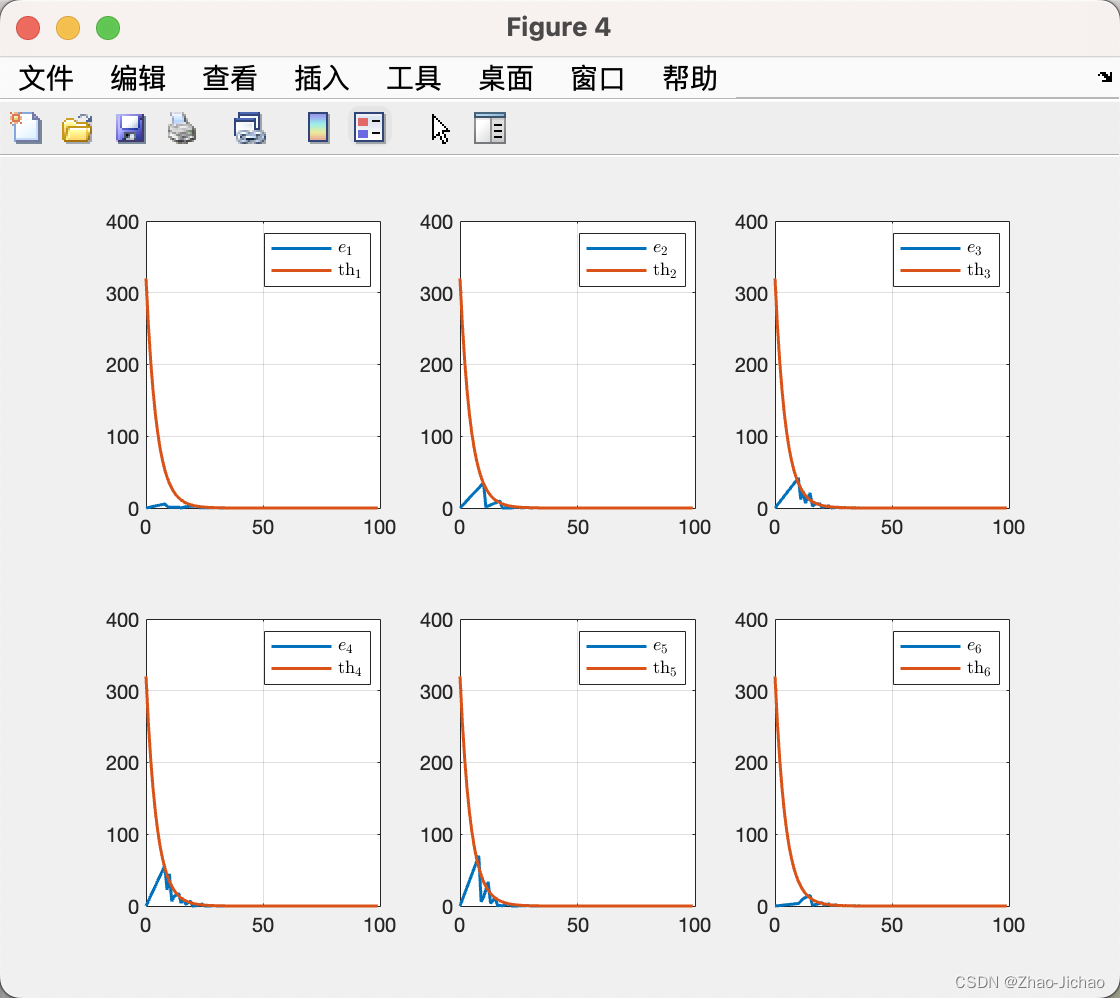
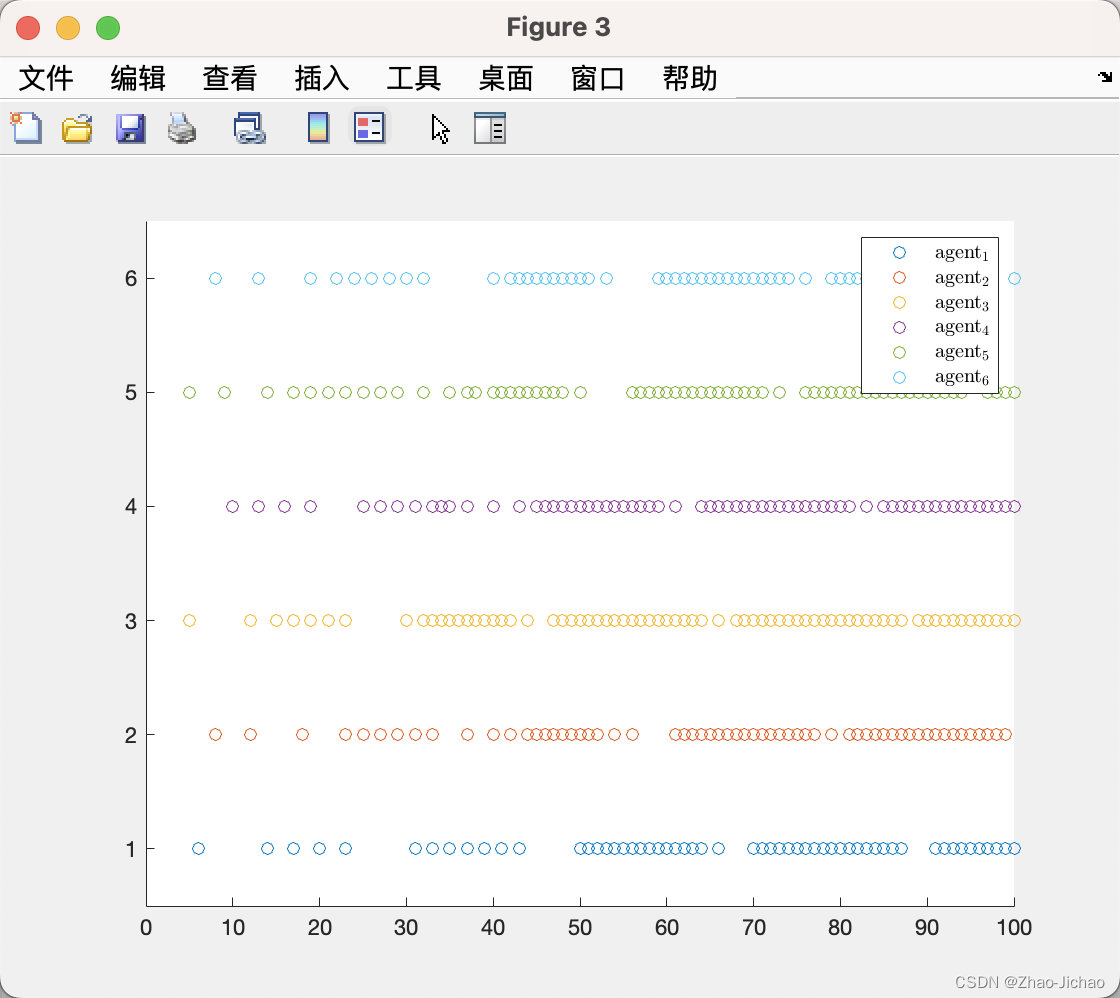
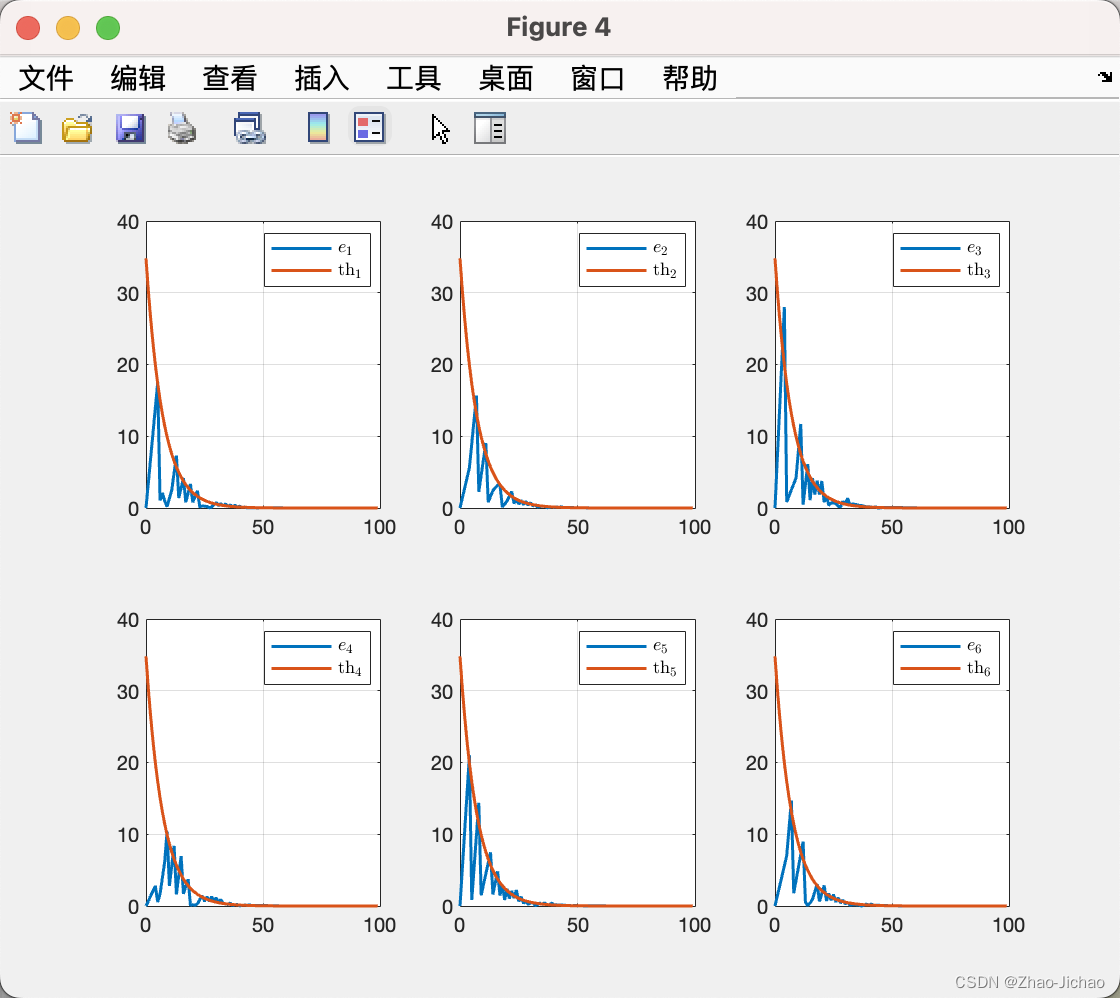
定义事件触发条件为:
kσ+1i=inf{k:k>kσi,∣ei(k)∣≥βαk}(3.6)\begin{aligned} k_{\sigma + 1}^{i} &= \inf \{ k: k > k_\sigma^i, |e_i(k)| \ge \beta \alpha^k \} \end{aligned}\tag{3.6}kσ+1i=inf{k:k>kσi,∣ei(k)∣≥βαk}(3.6)
第 4 章 有向符号图下离散多智能体系统的事件触发二分一致性
4.3.1 示例一
对应程序 Main_Ex4_3_1.m
4.3.2 示例二
对应程序 Main_Ex4_3_2.m
改成高阶
xi(k+1)=Axi(k)+Bui(k)(2.1)\begin{aligned} x_i (k+1) &= A x_i (k) + B u_i (k) \end{aligned}\tag{2.1}xi(k+1)=Axi(k)+Bui(k)(2.1)
ui(k)=−ϵ∑j∈Niin∣aij∣[x^i(k)−sign(aij)x^j(k)](3.1)\begin{aligned} u_i (k) &= -\epsilon \sum_{j \in N_i^{in}} |a_{ij}| [\hat{x}_i(k) - \text{sign}(a_{ij}) \hat{x}_j(k)] \end{aligned}\tag{3.1}ui(k)=−ϵj∈Niin∑∣aij∣[x^i(k)−sign(aij)x^j(k)](3.1)
kσ+1i=inf{k:k>kσi,∣ei(k)∣≥βαk}(3.6)\begin{aligned} k_{\sigma + 1}^{i} &= \inf \{ k: k > k_\sigma^i, |e_i(k)| \ge \beta \alpha^k \} \end{aligned}\tag{3.6}kσ+1i=inf{k:k>kσi,∣ei(k)∣≥βαk}(3.6)
上一篇:Onvif学习