
【STM32MP157应用编程】4.串口接收、发送数据
创始人
2024-05-31 02:41:31
0次
目录
串口文件
指令操作串口
程序操作串口
程序说明
程序代码
4_ChuanKou_2.c
启动交叉编译工具
编译
拷贝到开发板
测试
串口文件
在/dev目录下,存放了串口的文件。
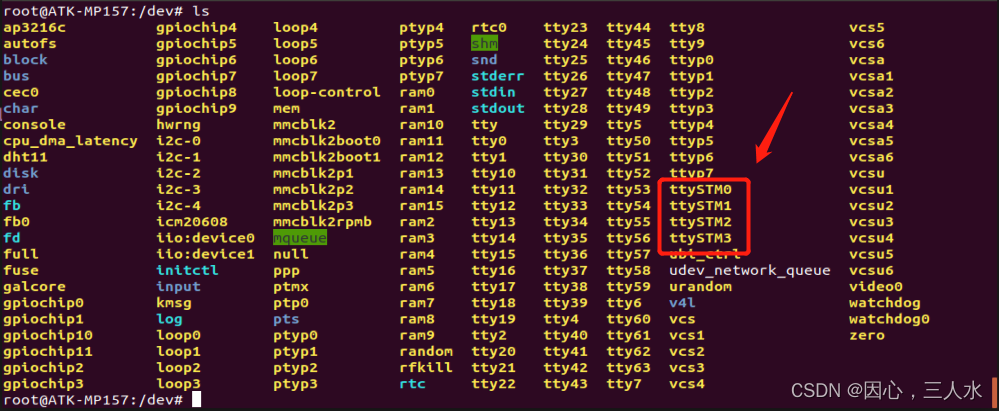
| 文件名 | 对应的串口 |
|---|---|
| ttySTM0 | CH340 |
| ttySTM1 | com2(公头) |
| ttySTM2 | com1(母头) |
| ttySTM3 | 被开发板的蓝牙所使用(不可用) |
注意:文件名的命名只跟驱动有关。
指令操作串口
设置com1串口波特率为115200。
stty -F ttySTM2 115200
向com1串口发送数据。
echo aaa > ttySTM2 
com1串口接收数据。
cat ttySTM2 
程序操作串口
程序说明
参数1:串口文件序号。
0:ttySTM0。
1:ttySTM1。
2:ttySTM2。
参数2:波特率。
程序代码
4_ChuanKou_2.c
#include
#include
#include
#include
#include
#include
#include
#include //./xxx 1 115200int main(int argc, char *argv[])
{//检查参数个数if (argc != 3){printf("%s文件的参数个数错误!\n", argv[0]);return -1;}//检查参数1是否为纯数字char *endptr;strtol(argv[1], &endptr, 10);if ((endptr == argv[1]) || ((!isspace(*endptr)) && (*endptr != '\0'))){perror("参数1错误!\n");return -1;}endptr = NULL;//检查参数2是否为纯数字strtol(argv[2], &endptr, 10);if ((endptr == argv[2]) || ((!isspace(*endptr)) && (*endptr != '\0'))){perror("参数2错误!\n");return -1;}//检查参数1的取值范围:<3if (atol(argv[1]) >= 3){perror("参数1错误!\n");return -1;}char tty_path[100];sprintf(tty_path, "/dev/ttySTM%s", argv[1]);int fd = open(tty_path, O_RDWR | O_NOCTTY);if (fd < 0){printf("打开%s失败!\n", tty_path);return -1;}//获取串口文件属性,以便于修改相应的属性struct termios options;if (tcgetattr(fd, &options) < 0){printf("获取串口属性错误!\n");return -1;}//设置波特率if (strcmp(argv[2], "50") == 0){cfsetispeed(&options, B50); //设置串口输入波特率cfsetospeed(&options, B50); //设置串口输出波特率}else if (strcmp(argv[2], "75") == 0){cfsetispeed(&options, B75); //设置串口输入波特率cfsetospeed(&options, B75); //设置串口输出波特率}else if (strcmp(argv[2], "110") == 0){cfsetispeed(&options, B110); //设置串口输入波特率cfsetospeed(&options, B110); //设置串口输出波特率}else if (strcmp(argv[2], "134") == 0){cfsetispeed(&options, B134); //设置串口输入波特率cfsetospeed(&options, B134); //设置串口输出波特率}else if (strcmp(argv[2], "150") == 0){cfsetispeed(&options, B150); //设置串口输入波特率cfsetospeed(&options, B150); //设置串口输出波特率}else if (strcmp(argv[2], "200") == 0){cfsetispeed(&options, B200); //设置串口输入波特率cfsetospeed(&options, B200); //设置串口输出波特率}else if (strcmp(argv[2], "300") == 0){cfsetispeed(&options, B300); //设置串口输入波特率cfsetospeed(&options, B300); //设置串口输出波特率}else if (strcmp(argv[2], "600") == 0){cfsetispeed(&options, B600); //设置串口输入波特率cfsetospeed(&options, B600); //设置串口输出波特率}else if (strcmp(argv[2], "1200") == 0){cfsetispeed(&options, B1200); //设置串口输入波特率cfsetospeed(&options, B1200); //设置串口输出波特率}else if (strcmp(argv[2], "1800") == 0){cfsetispeed(&options, B1800); //设置串口输入波特率cfsetospeed(&options, B1800); //设置串口输出波特率}else if (strcmp(argv[2], "2400") == 0){cfsetispeed(&options, B2400); //设置串口输入波特率cfsetospeed(&options, B2400); //设置串口输出波特率}else if (strcmp(argv[2], "2400") == 0){cfsetispeed(&options, B2400); //设置串口输入波特率cfsetospeed(&options, B2400); //设置串口输出波特率}else if (strcmp(argv[2], "4800") == 0){cfsetispeed(&options, B4800); //设置串口输入波特率cfsetospeed(&options, B4800); //设置串口输出波特率}else if (strcmp(argv[2], "9600") == 0){cfsetispeed(&options, B9600); //设置串口输入波特率cfsetospeed(&options, B9600); //设置串口输出波特率}else if (strcmp(argv[2], "19200") == 0){cfsetispeed(&options, B19200); //设置串口输入波特率cfsetospeed(&options, B19200); //设置串口输出波特率}else if (strcmp(argv[2], "38400") == 0){cfsetispeed(&options, B38400); //设置串口输入波特率cfsetospeed(&options, B38400); //设置串口输出波特率}else if (strcmp(argv[2], "57600") == 0){cfsetispeed(&options, B57600); //设置串口输入波特率cfsetospeed(&options, B57600); //设置串口输出波特率}else if (strcmp(argv[2], "115200") == 0){cfsetispeed(&options, B115200); //设置串口输入波特率cfsetospeed(&options, B115200); //设置串口输出波特率}else if (strcmp(argv[2], "230400") == 0){cfsetispeed(&options, B230400); //设置串口输入波特率cfsetospeed(&options, B230400); //设置串口输出波特率}else if (strcmp(argv[2], "460800") == 0){cfsetispeed(&options, B460800); //设置串口输入波特率cfsetospeed(&options, B460800); //设置串口输出波特率}else if (strcmp(argv[2], "500000") == 0){cfsetispeed(&options, B500000); //设置串口输入波特率cfsetospeed(&options, B500000); //设置串口输出波特率}else if (strcmp(argv[2], "576000") == 0){cfsetispeed(&options, B576000); //设置串口输入波特率cfsetospeed(&options, B576000); //设置串口输出波特率}else if (strcmp(argv[2], "921600") == 0){cfsetispeed(&options, B921600); //设置串口输入波特率cfsetospeed(&options, B921600); //设置串口输出波特率}else if (strcmp(argv[2], "1000000") == 0){cfsetispeed(&options, B1000000); //设置串口输入波特率cfsetospeed(&options, B1000000); //设置串口输出波特率}else if (strcmp(argv[2], "1152000") == 0){cfsetispeed(&options, B1152000); //设置串口输入波特率cfsetospeed(&options, B1152000); //设置串口输出波特率}else if (strcmp(argv[2], "1500000") == 0){cfsetispeed(&options, B1500000); //设置串口输入波特率cfsetospeed(&options, B1500000); //设置串口输出波特率}else if (strcmp(argv[2], "2000000") == 0){cfsetispeed(&options, B2000000); //设置串口输入波特率cfsetospeed(&options, B2000000); //设置串口输出波特率}else if (strcmp(argv[2], "2500000") == 0){cfsetispeed(&options, B2500000); //设置串口输入波特率cfsetospeed(&options, B2500000); //设置串口输出波特率}else if (strcmp(argv[2], "3000000") == 0){cfsetispeed(&options, B3000000); //设置串口输入波特率cfsetospeed(&options, B3000000); //设置串口输出波特率}else if (strcmp(argv[2], "3500000") == 0){cfsetispeed(&options, B3500000); //设置串口输入波特率cfsetospeed(&options, B3500000); //设置串口输出波特率}else if (strcmp(argv[2], "4000000") == 0){cfsetispeed(&options, B4000000); //设置串口输入波特率cfsetospeed(&options, B4000000); //设置串口输出波特率}else{printf("波特率参数错误!\n");return -1;}//设置串口属性if (tcsetattr(fd, TCSANOW, &options) < 0){printf("设置串口属性错误!\n");return -1;}printf("设置串口完成!\n");printf("串口启动!\n");//创建进程,读写串口功能分开pid_t jin_cheng = fork();if (jin_cheng < 0){printf("创建进程错误!\n");return -1;}else if (jin_cheng == 0) //子进程{char data[1024];int num = 0;while (1){while ((num = read(fd, &data, 1024)) != 0){printf("读取到的数据为:%s\n", data);memset(data, '\0', strlen(data));num = 0;read(fd, &data, 1024); //读掉最后的停止位}}}else if (jin_cheng > 0) //父进程{char data[1024];while (1){scanf("%s", data);getchar();write(fd, data, strlen(data));memset(data, '\0', strlen(data));}}close(fd);return 0;
} 启动交叉编译工具
source /opt/st/stm32mp1/3.1-snapshot/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
编译
${CC} -o 4_ChuanKou_2 4_ChuanKou_2.c 
拷贝到开发板
scp 4_ChuanKou_2 root@10.3.22.219:/home/root/Linux_C_YingYong_BianCheng/JiaoCheng/4_ChuanKou/

测试
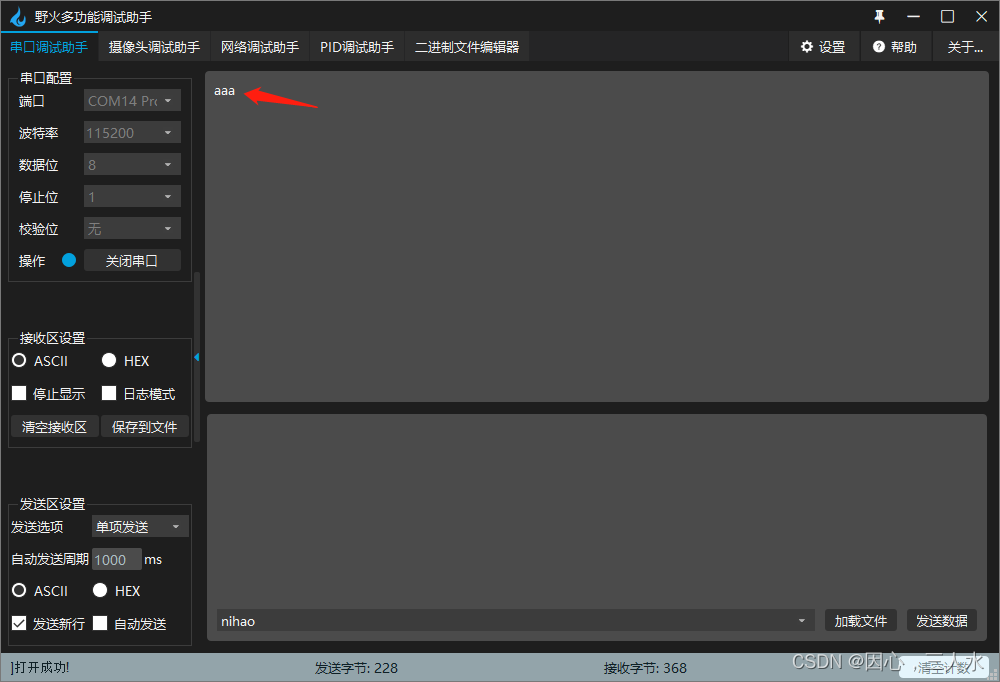
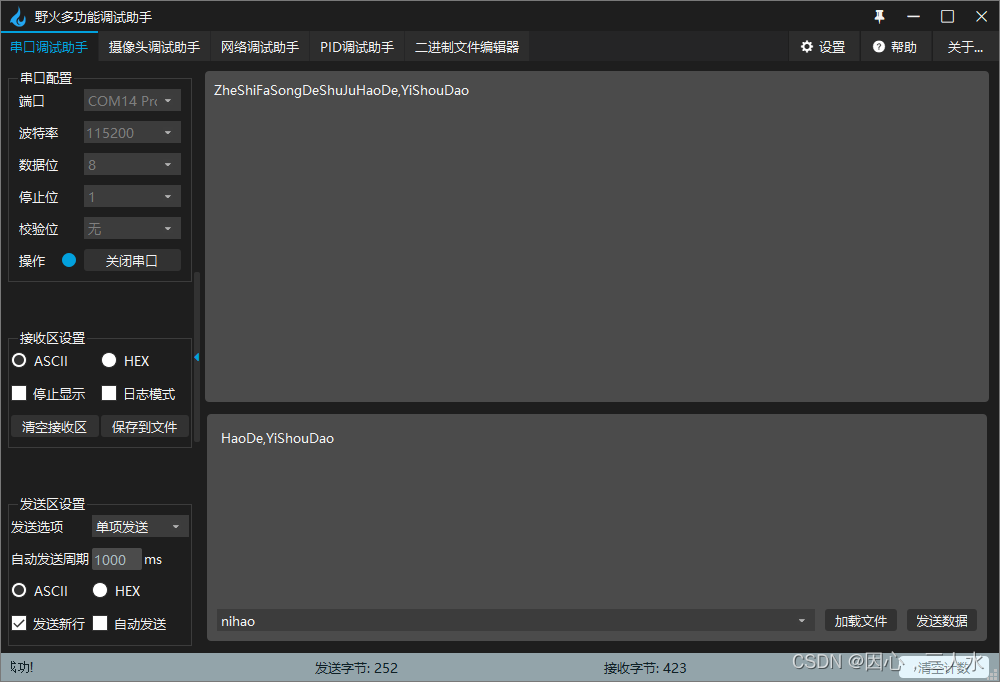
使用com1串口进行数据收发,设置波特率为115200。
./4_ChuanKou_2 2 115200
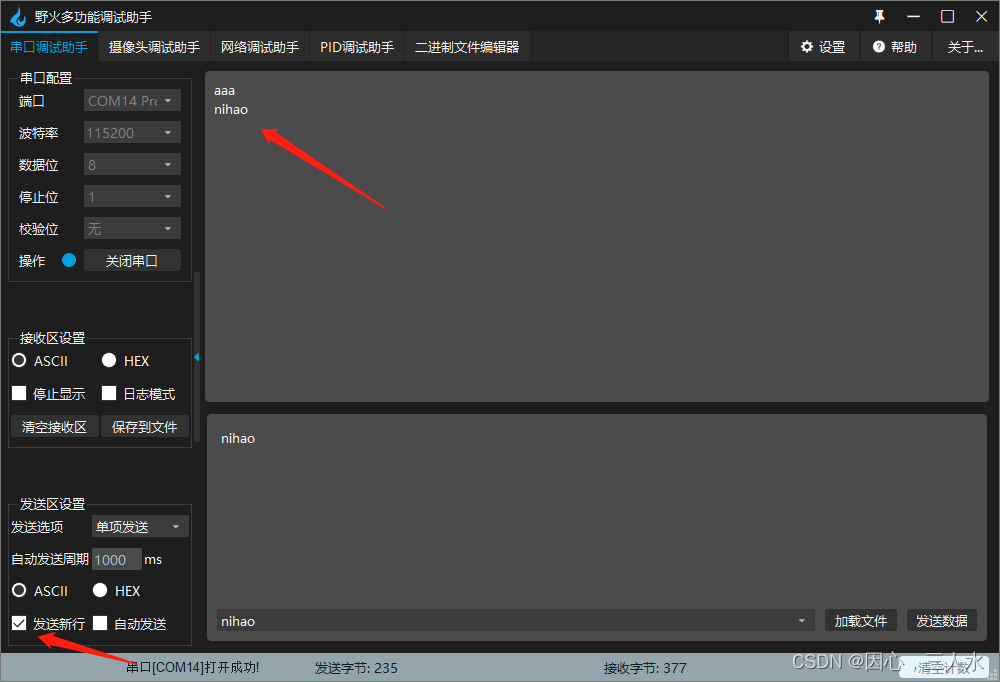
发送数据。

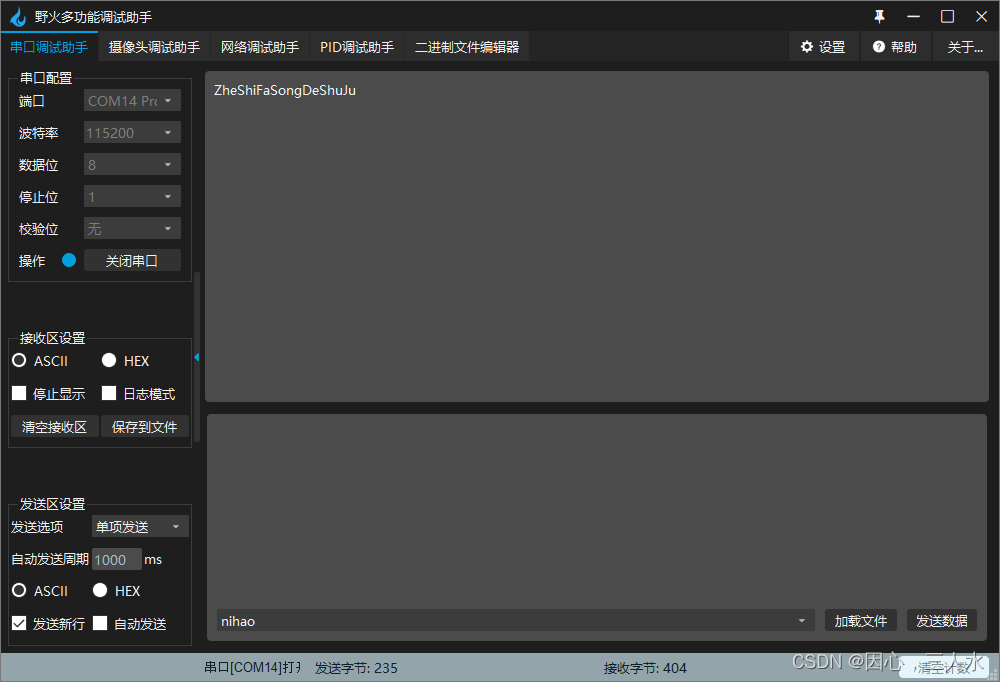
接收数据。

相关内容
热门资讯
电视安卓系统哪个品牌好,哪家品...
你有没有想过,家里的电视是不是该升级换代了呢?现在市面上电视品牌琳琅满目,各种操作系统也是让人眼花缭...
安卓会员管理系统怎么用,提升服...
你有没有想过,手机里那些你爱不释手的APP,背后其实有个强大的会员管理系统在默默支持呢?没错,就是那...
安卓系统软件使用技巧,解锁软件...
你有没有发现,用安卓手机的时候,总有一些小技巧能让你玩得更溜?别小看了这些小细节,它们可是能让你的手...
安卓系统提示音替换
你知道吗?手机里那个时不时响起的提示音,有时候真的能让人心情大好,有时候又让人抓狂不已。今天,就让我...
安卓开机不了系统更新
手机突然开不了机,系统更新还卡在那里,这可真是让人头疼的问题啊!你是不是也遇到了这种情况?别急,今天...
安卓系统中微信视频,安卓系统下...
你有没有发现,现在用手机聊天,视频通话简直成了标配!尤其是咱们安卓系统的小伙伴们,微信视频功能更是用...
安卓系统是服务器,服务器端的智...
你知道吗?在科技的世界里,安卓系统可是个超级明星呢!它不仅仅是个手机操作系统,竟然还能成为服务器的得...
pc电脑安卓系统下载软件,轻松...
你有没有想过,你的PC电脑上安装了安卓系统,是不是瞬间觉得世界都大不一样了呢?没错,就是那种“一机在...
电影院购票系统安卓,便捷观影新...
你有没有想过,在繁忙的生活中,一部好电影就像是一剂强心针,能瞬间让你放松心情?而我今天要和你分享的,...
安卓系统可以写程序?
你有没有想过,安卓系统竟然也能写程序呢?没错,你没听错!这个我们日常使用的智能手机操作系统,竟然有着...
安卓系统架构书籍推荐,权威书籍...
你有没有想过,想要深入了解安卓系统架构,却不知道从何下手?别急,今天我就要给你推荐几本超级实用的书籍...
安卓系统看到的炸弹,技术解析与...
安卓系统看到的炸弹——揭秘手机中的隐形威胁在数字化时代,智能手机已经成为我们生活中不可或缺的一部分。...
鸿蒙系统有安卓文件,畅享多平台...
你知道吗?最近在科技圈里,有个大新闻可是闹得沸沸扬扬的,那就是鸿蒙系统竟然有了安卓文件!是不是觉得有...
宝马安卓车机系统切换,驾驭未来...
你有没有发现,现在的汽车越来越智能了?尤其是那些豪华品牌,比如宝马,它们的内饰里那个大屏幕,简直就像...
p30退回安卓系统
你有没有听说最近P30的用户们都在忙活一件大事?没错,就是他们的手机要退回安卓系统啦!这可不是一个简...
oppoa57安卓原生系统,原...
你有没有发现,最近OPPO A57这款手机在安卓原生系统上的表现真是让人眼前一亮呢?今天,就让我带你...
安卓系统输入法联想,安卓系统输...
你有没有发现,手机上的输入法真的是个神奇的小助手呢?尤其是安卓系统的输入法,简直就是智能生活的点睛之...
怎么进入安卓刷机系统,安卓刷机...
亲爱的手机控们,你是否曾对安卓手机的刷机系统充满好奇?想要解锁手机潜能,体验全新的系统魅力?别急,今...
安卓系统程序有病毒
你知道吗?在这个数字化时代,手机已经成了我们生活中不可或缺的好伙伴。但是,你知道吗?即使是安卓系统,...
奥迪中控安卓系统下载,畅享智能...
你有没有发现,现在汽车的中控系统越来越智能了?尤其是奥迪这种豪华品牌,他们的中控系统简直就是科技与艺...