
STM32F103CubeMX定时器
创始人
2024-06-01 13:34:48
0次
前言
定时器作为最重要的内容之一,是每一位嵌入式软件工程师必备的能力。STM32F103的定时器是非常强大的。
1,他可以用于精准定时,当成延时函数来使用。不过个人不建议这么使用,因为定时器很强大,这么搞太浪费了。如果想精准延时,建议使用滴答定时器。STM32滴答定时器SysTick精准延时,兼容HAL库和标准库
2,STM32F103的定时器可以用于定时中断,每过一段事件执行另外一段代码。
3,STM32F103的定时器能够硬件输出PWM,这个是比较常用的。如果是从C51转到STM32的初学者能够深刻感受到硬件PWM的好处。如果是C51,只能使用定时器中断,模拟PWM,具有一定的误差,而且要时刻注意其他中断会不会影响到软件PWM。但是STM32的硬件PWM无需担心这么多,只需要开始配置好硬件PWM,他就会自己运转,极其简单方便。
4,STM32的定时器有输入捕获功能,能够借此计算出输入方波的周期。
5,STM32的定时器还有编码器模式,可以给小车进行精准测速。然后根据时间和速度,还可以在没有其他辅助定位的情况下,给小车进行定位。
6,STM32还有其他的高级玩法,比如SPWM输出,死区等等。对于初学者,个人建议只要学好2,3点即可,本文也只会介绍这两点。
定时器介绍
定时器分类
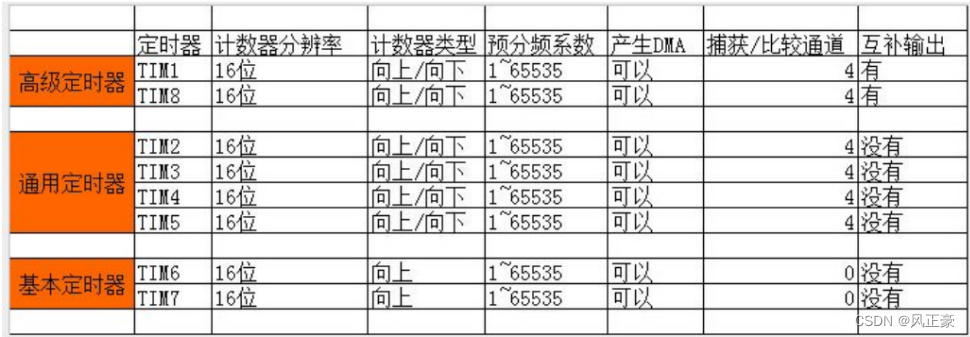
STM32F103的定时器有三种,基本定时器(TIM6-TIM7),通用定时器(TIM2-TIM5)和高级定时器(TIM1和TIM8)。
但是不是所有型号的STM32F103系列单片机都有这些功能,对于市面上最为常见的STM32F103C8T6而言,他只具备一个高级定时器(TIM1)和三个通用定时器(TIM2-TIM4)。
定时器作用
定时器类型 | 主要功能 |
基本定时器 | 没有输入捕获通道,常用于时基,即定时功能。(也就是只能用于定时器中断,无法硬件PWM,与C51的定时器一样作用) |
通用定时器 | 具有多路独立通道,可用于输入捕获/比较,也可用于时基。(多路独立通道是指,一个通用定时器可以同时输出4路硬件PWM。输入捕获,可以计算方波的高低电平持续时间。比较功能是指硬件PWM) |
高级定时器 | 除具备通用定时器所有功能外,还具备带死区控制的互补信号输出、刹车输入等功能。(可用于电机控制、数字电源设计等。新手建议将高级定时器当成通用定时器来使用,其他功能,建议需要的时候再学。) |
计数器分辨率:表示能够记录多少个数,如果是n位分辨率,那么可以记录个数。此处16位分辨率,所以可以记录0-65535,一共65536个数。
计数器类型:
如果计数器类型是向上计数,那么计数就是0,1,2...65535,0。
如果是向下计数,那么计数就是65535,65534...0,65535。(看图二)
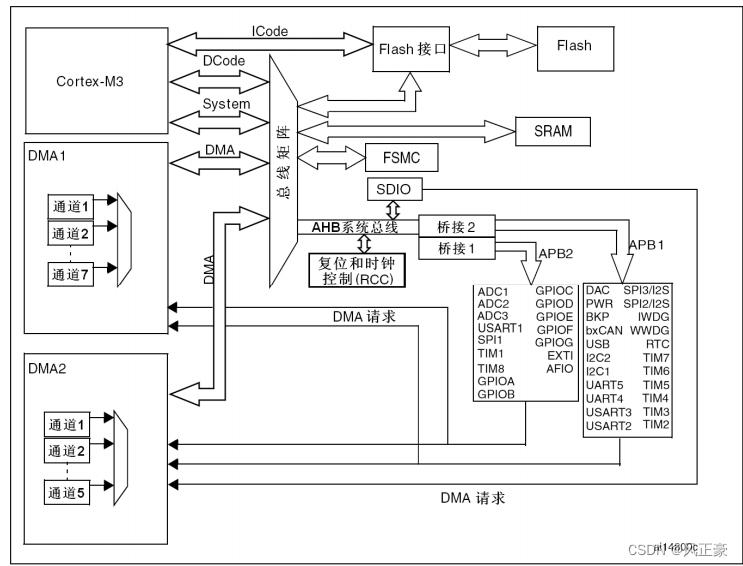
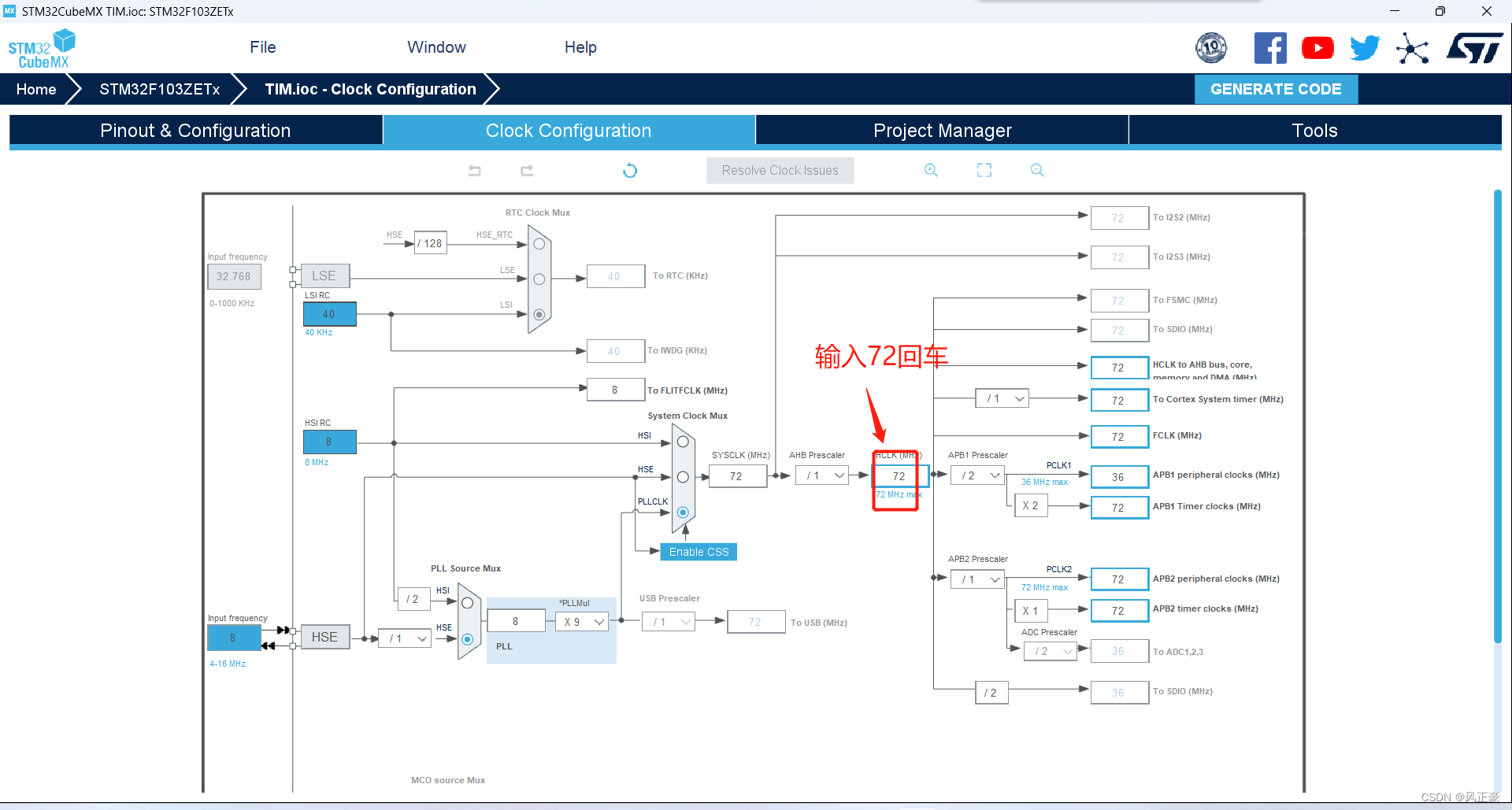
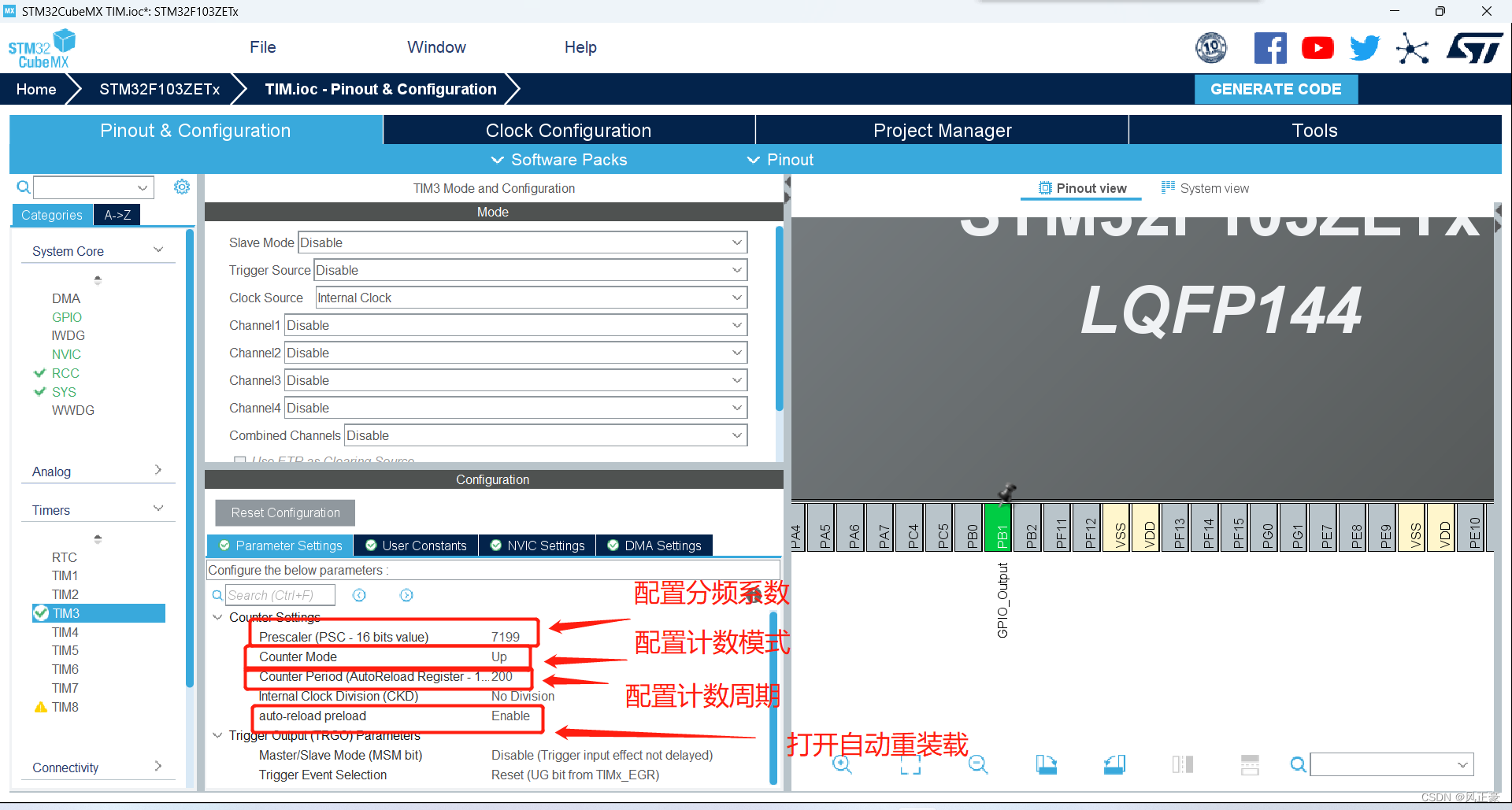
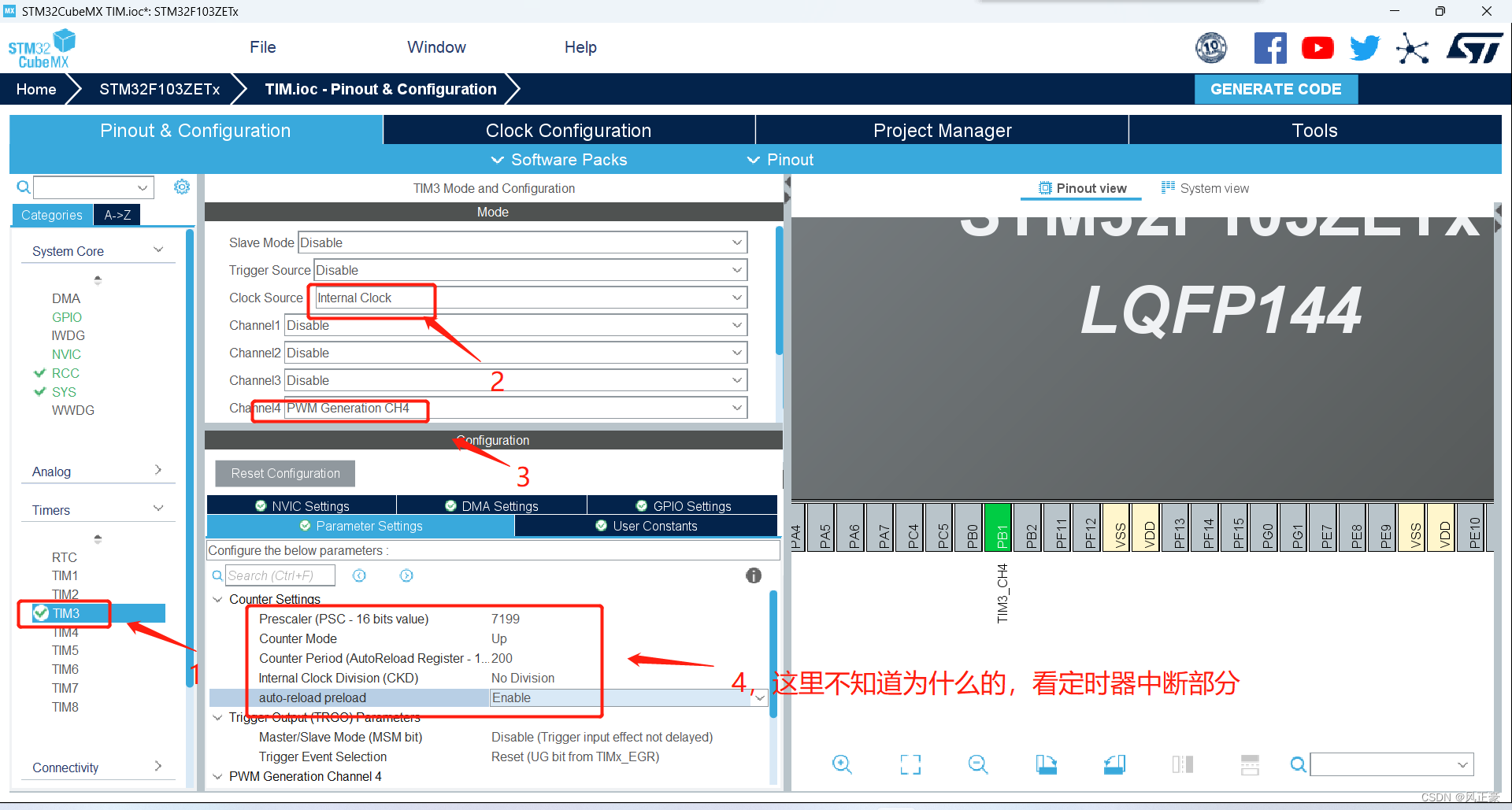
预分频系数:假设我们现在的APB1是72MHZ,由图三可知TIM2是由APB1提供时基,所以此时TIM2的频率是72MHZ,这也代表了TIM2的计数寄存器跳变72次才等于1us。这样的话,TIM2的最大定时事件就只有6.5536ms(16位定时器)。这个定时事件太短了,而且高频代表着耗电(一般不考虑),所以我们需要一个预分频器进行分频。比如分频7199(注意,因为是从0开始,所以想要分频7200,就输入7199),那么现在定时器的实际频率就是10kHZ,表示TIM2计数寄存器增加1,代表着100us。
DMA:DMA是可以不经过CPU,就将数据传输到指定位置。对新手而言,学习定时器的时候,这个暂时不需要了解。
捕获/比较通道:这个可以用来捕获外界波形数据,本章暂时不介绍,如果我啥时候需要用了会补充。比较通道是用于输出硬件PWM的。
互补通道:互补通道就是,通道1输出高电平,那么通道2就输出低电平。

实操
定时器中断
cubemx配置
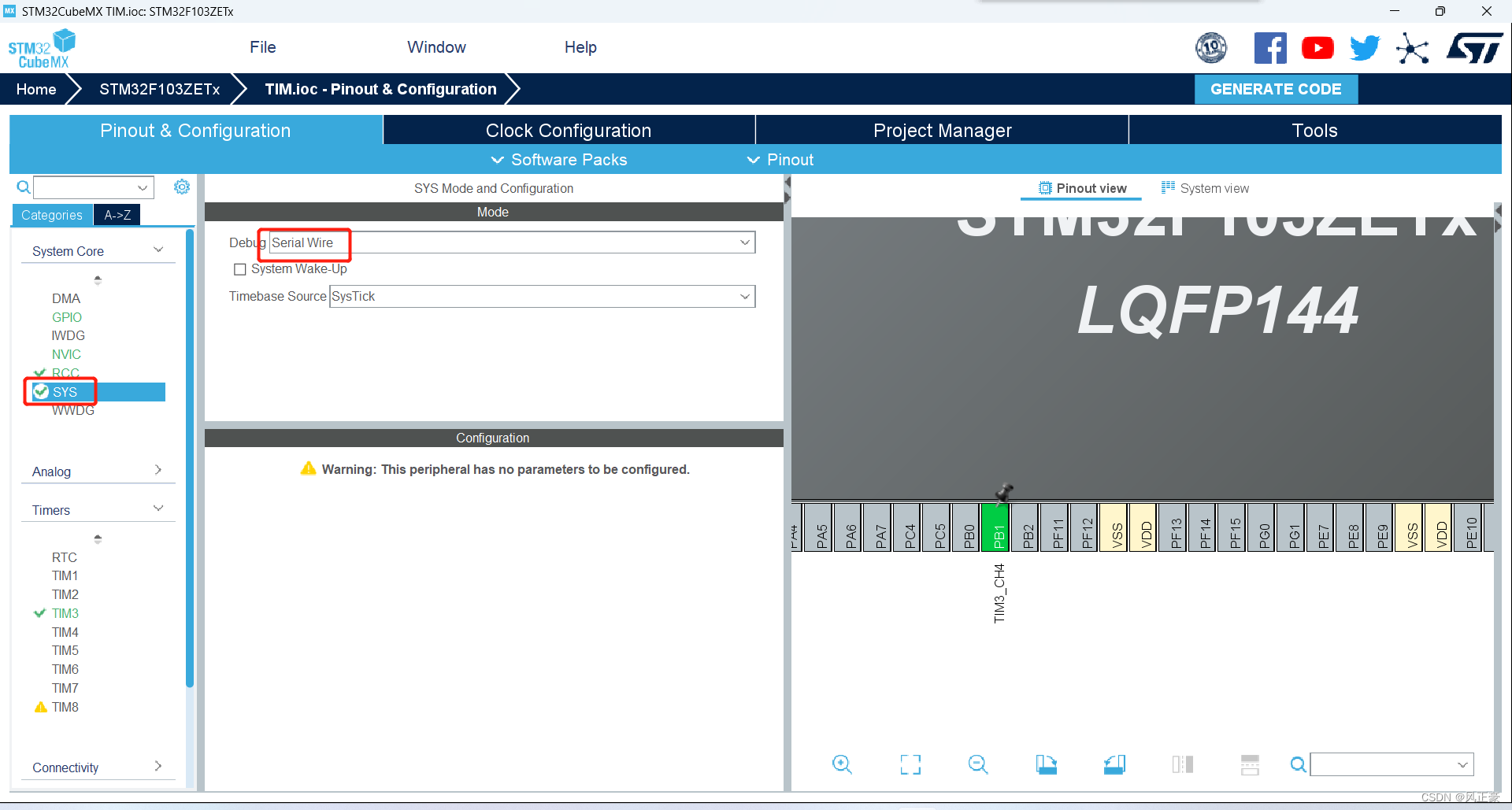
前期配置
这部分懒得再讲了,不知道为什么的看STM32CubeMX新建工程并点亮一个LED;

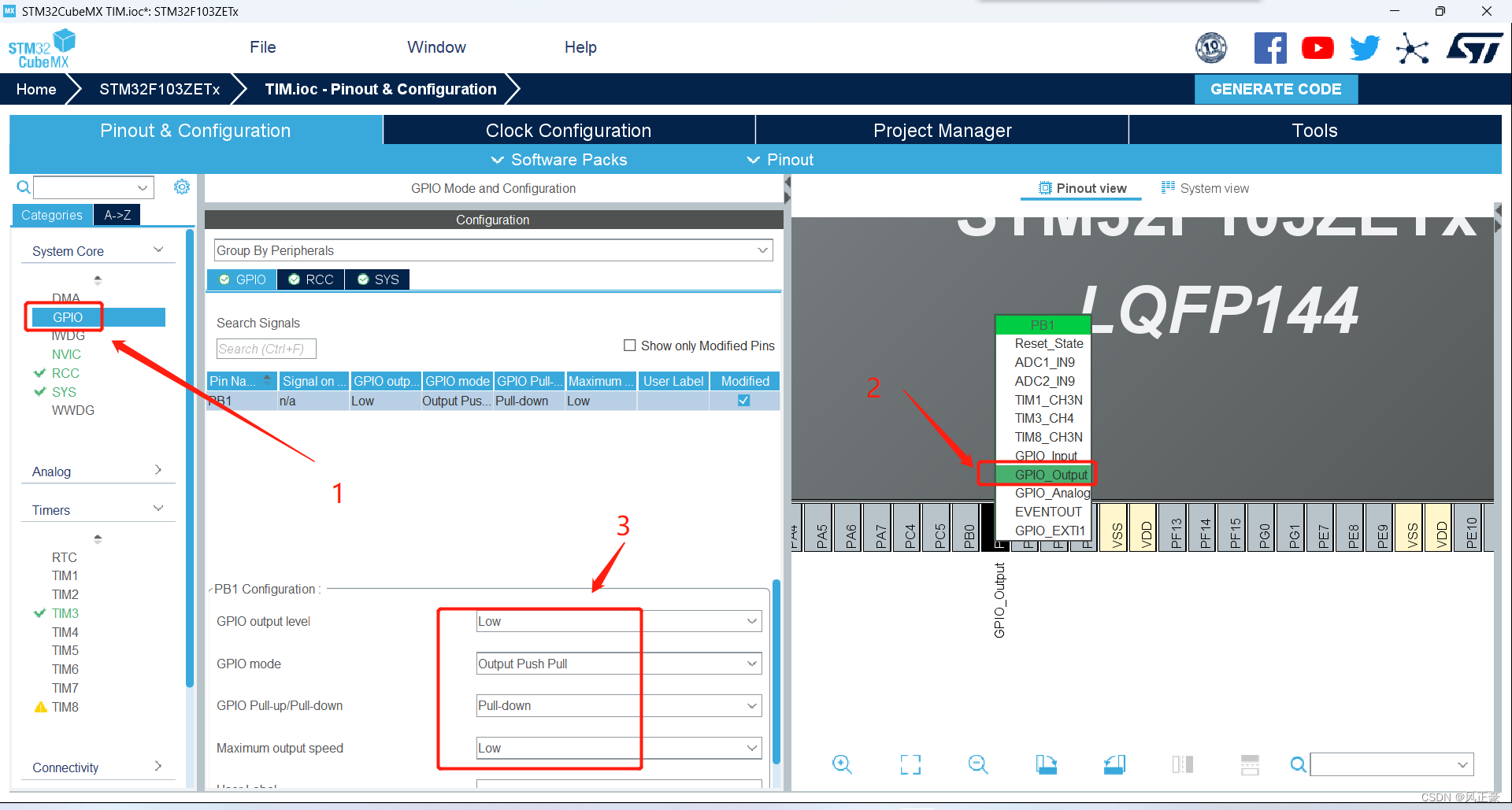
GPIO配置
定时器配置

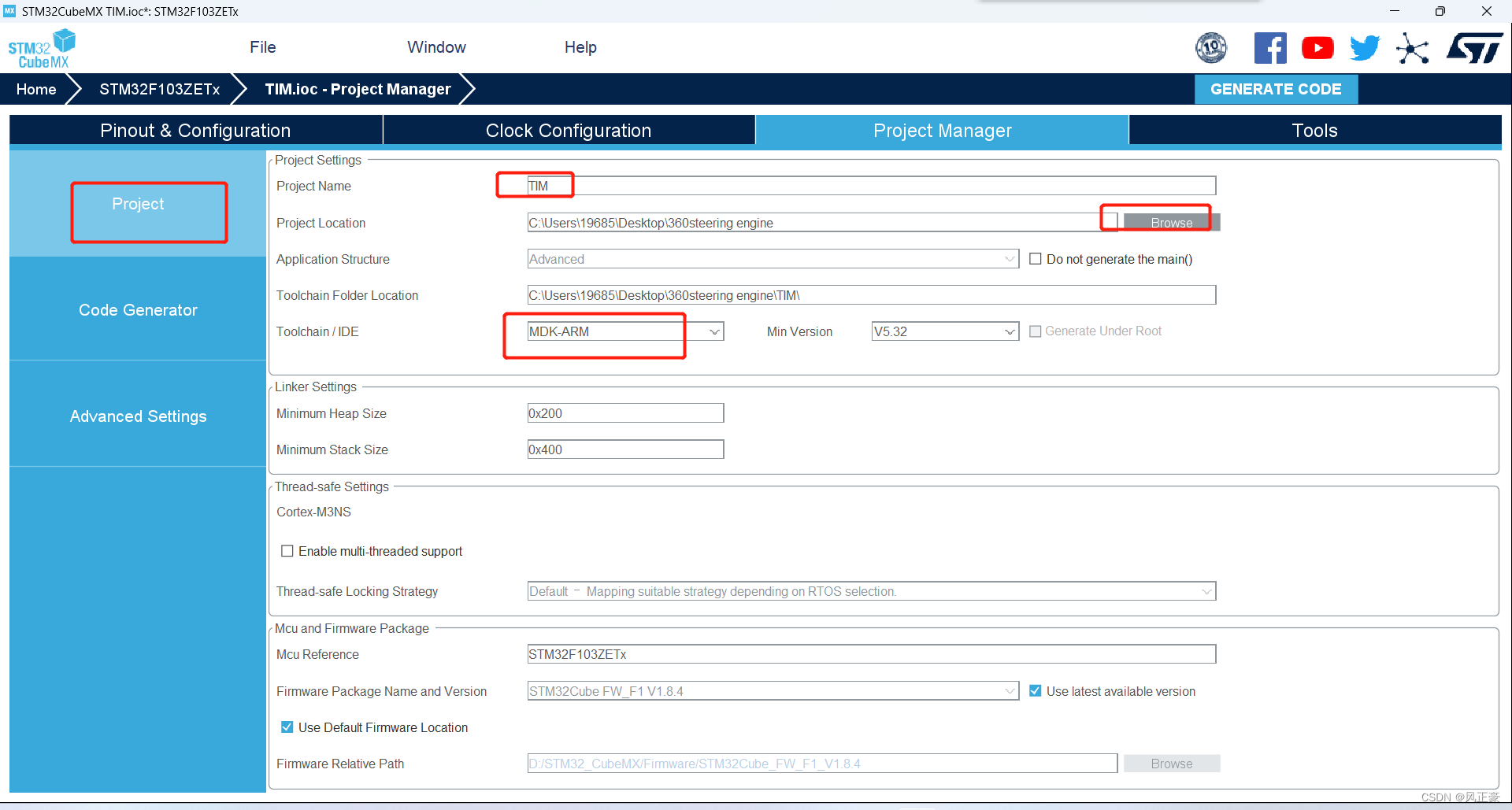
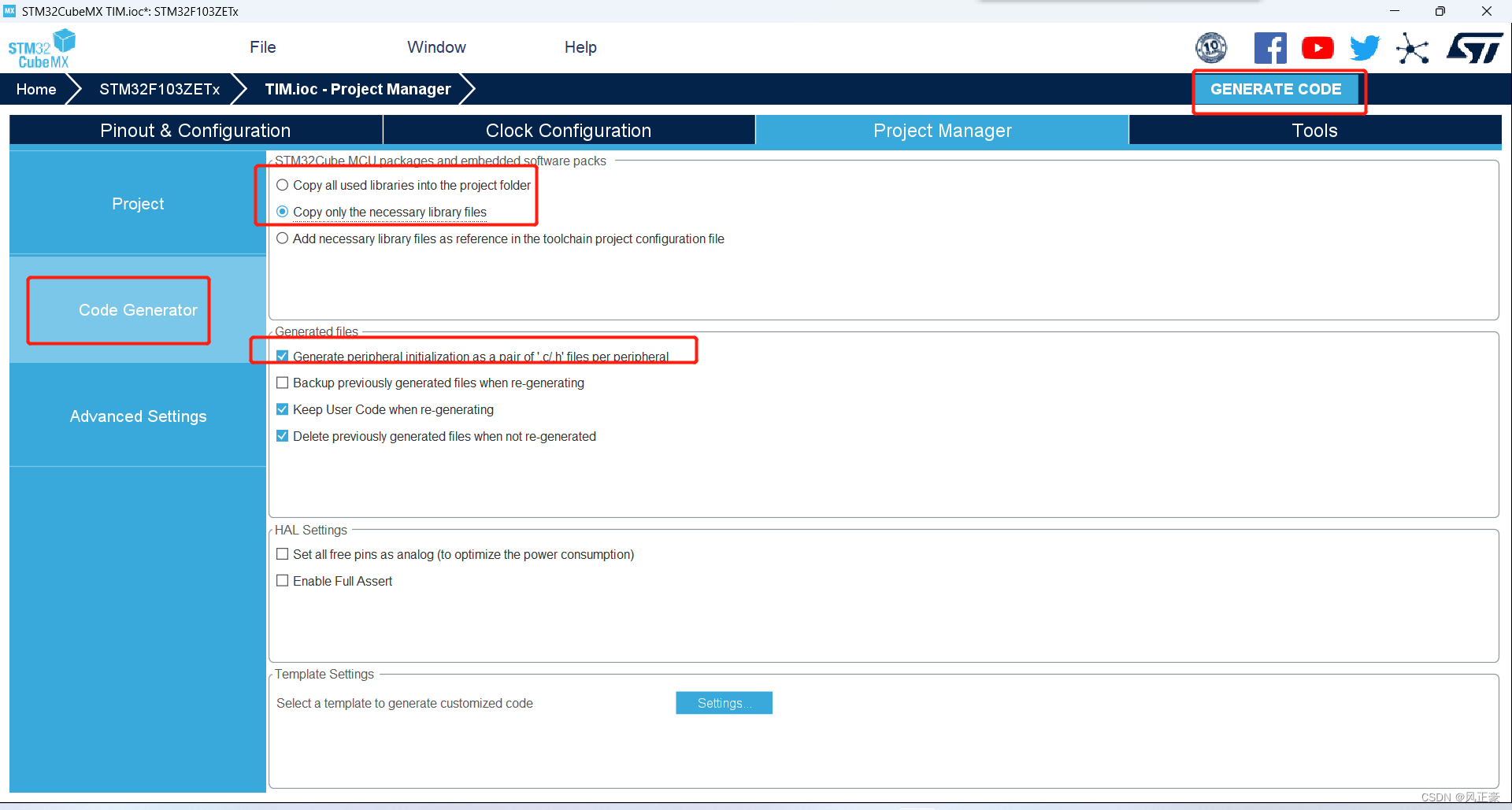
文件生成
这部分懒得再讲了,不知道为什么的看STM32CubeMX新建工程并点亮一个LED;
keil编写
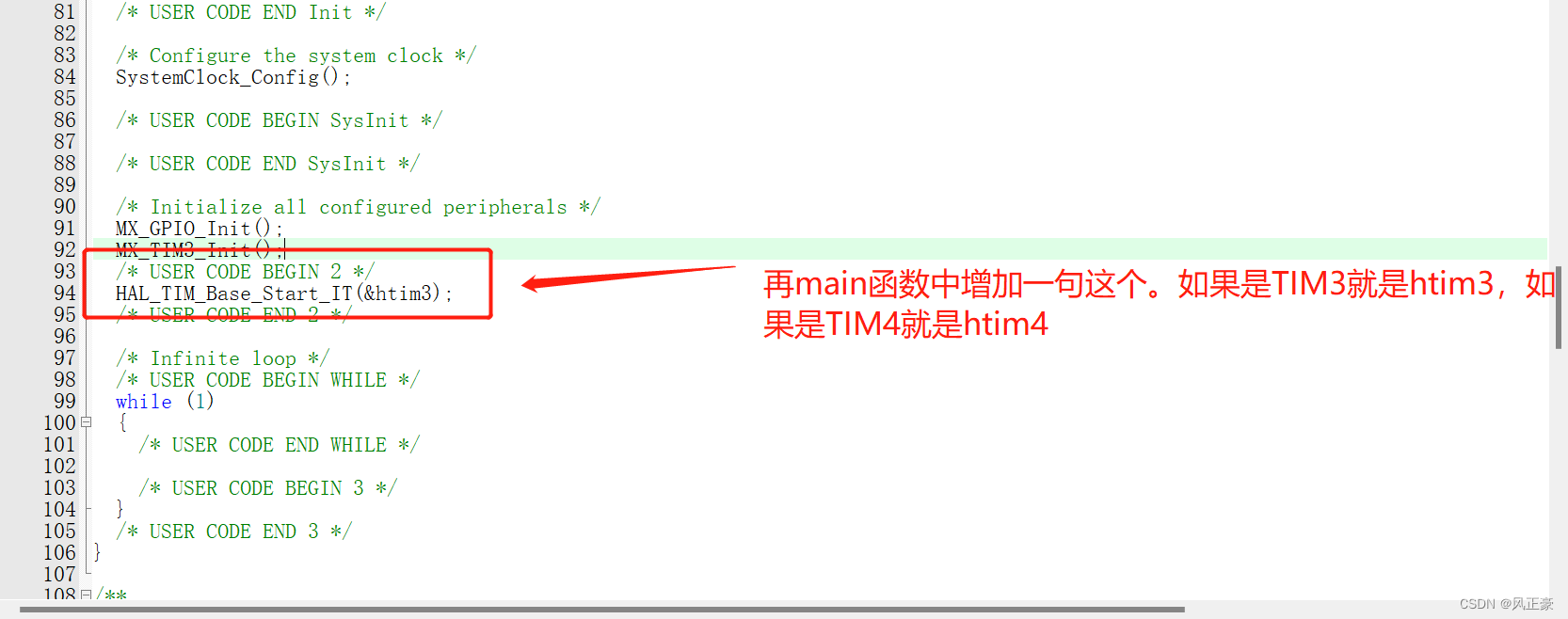
(1)这里需要做两步工作,第一步是再main函数中打开定时器中断。第二部是编写中断函数。
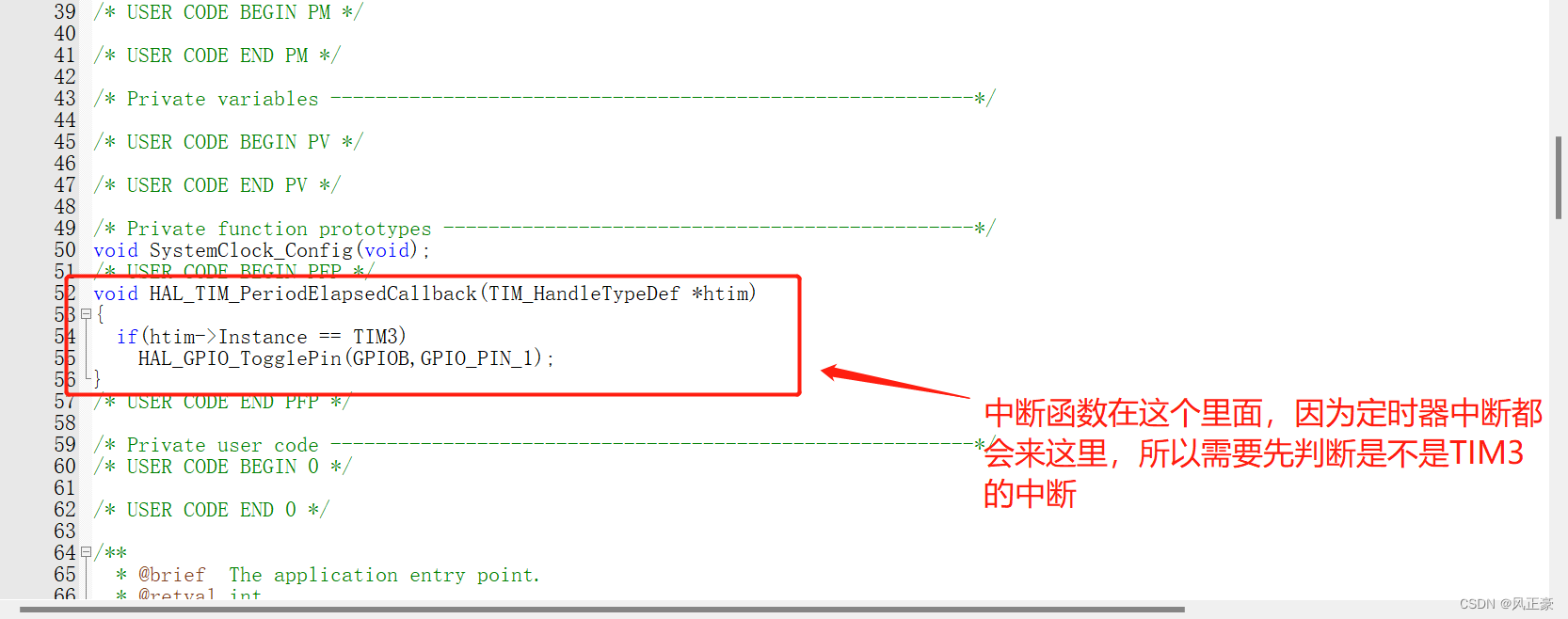
//中断函数随便找一个地方放着
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance == TIM3)HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_1);
}//这个放在main函数里面,死循环前面,定时器初始化后面
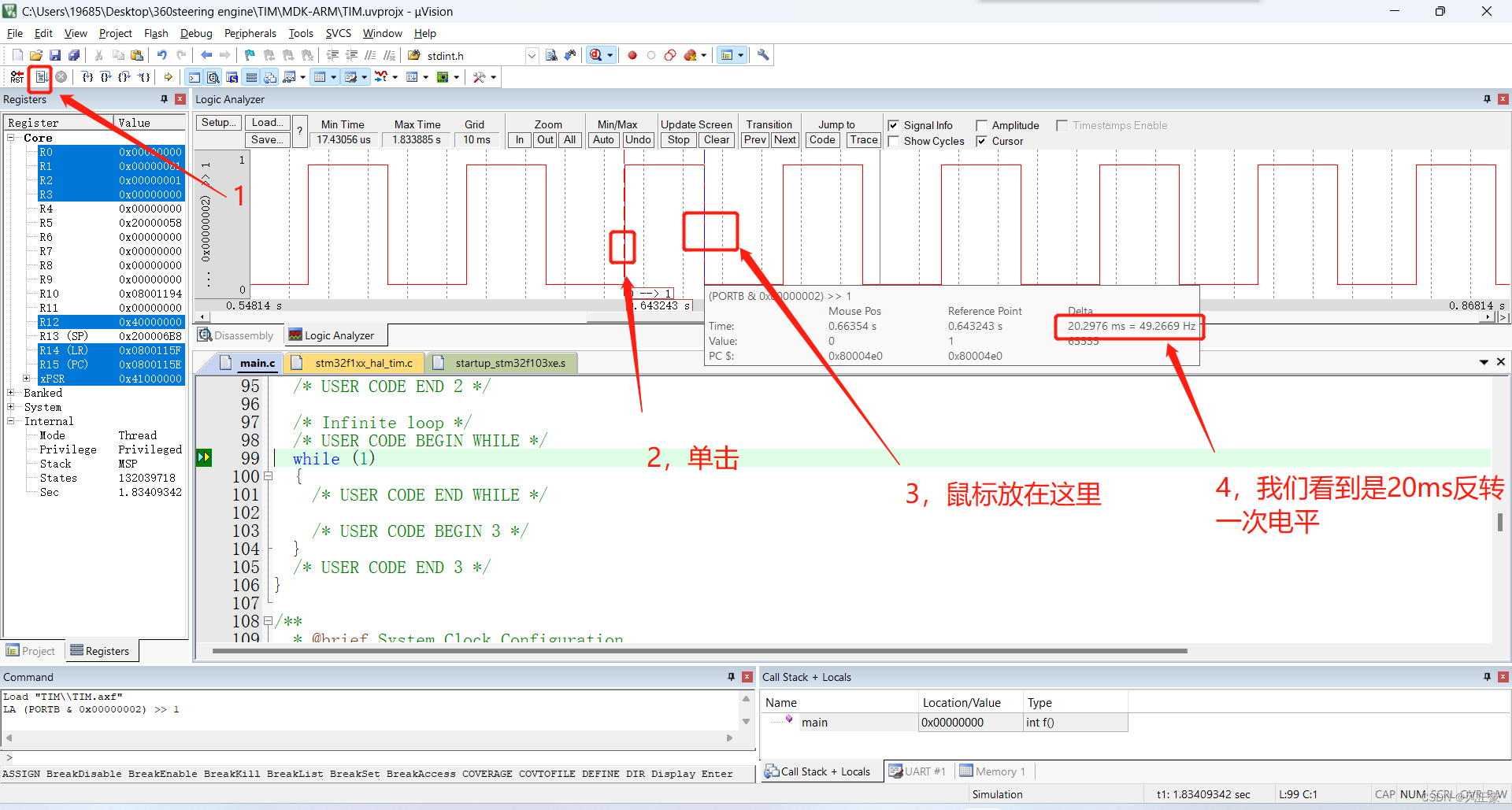
HAL_TIM_Base_Start_IT(&htim3);结果
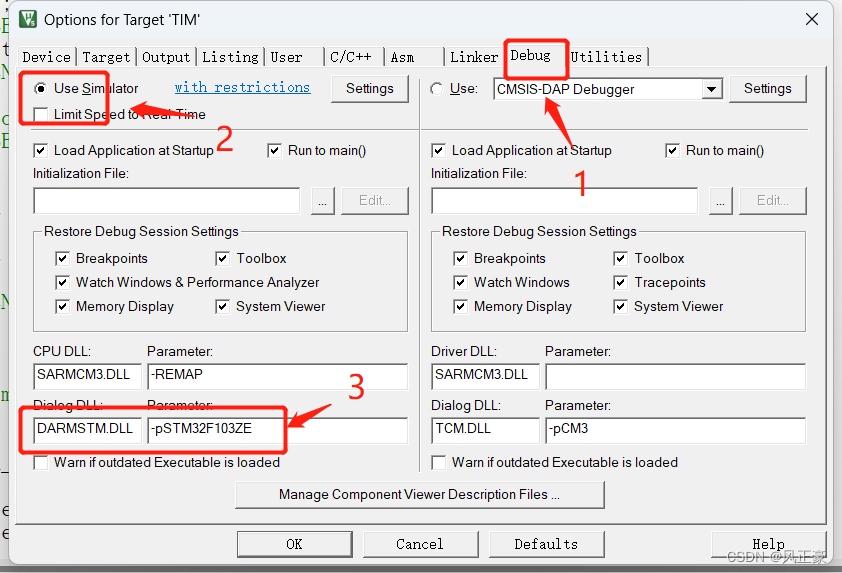
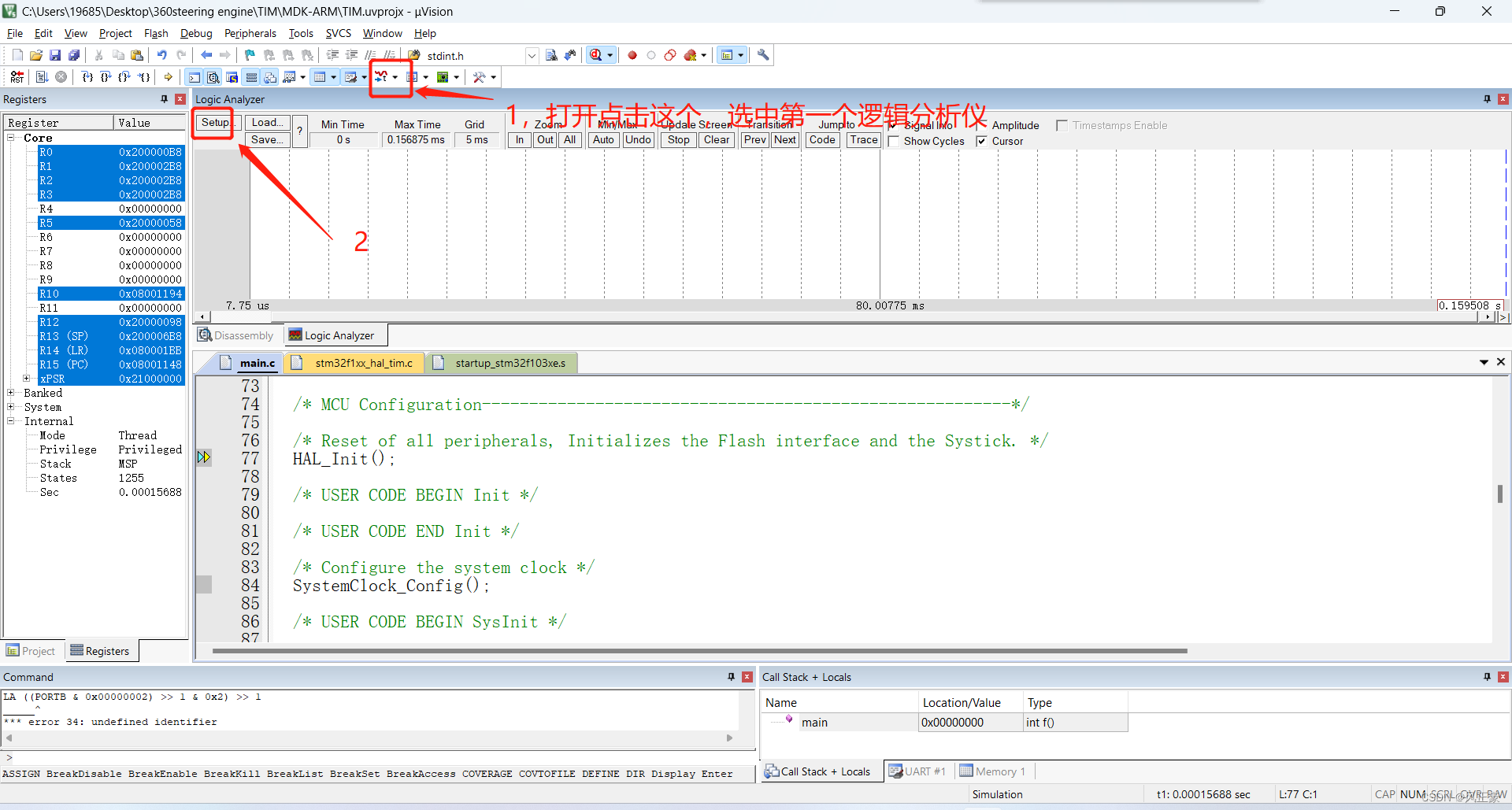
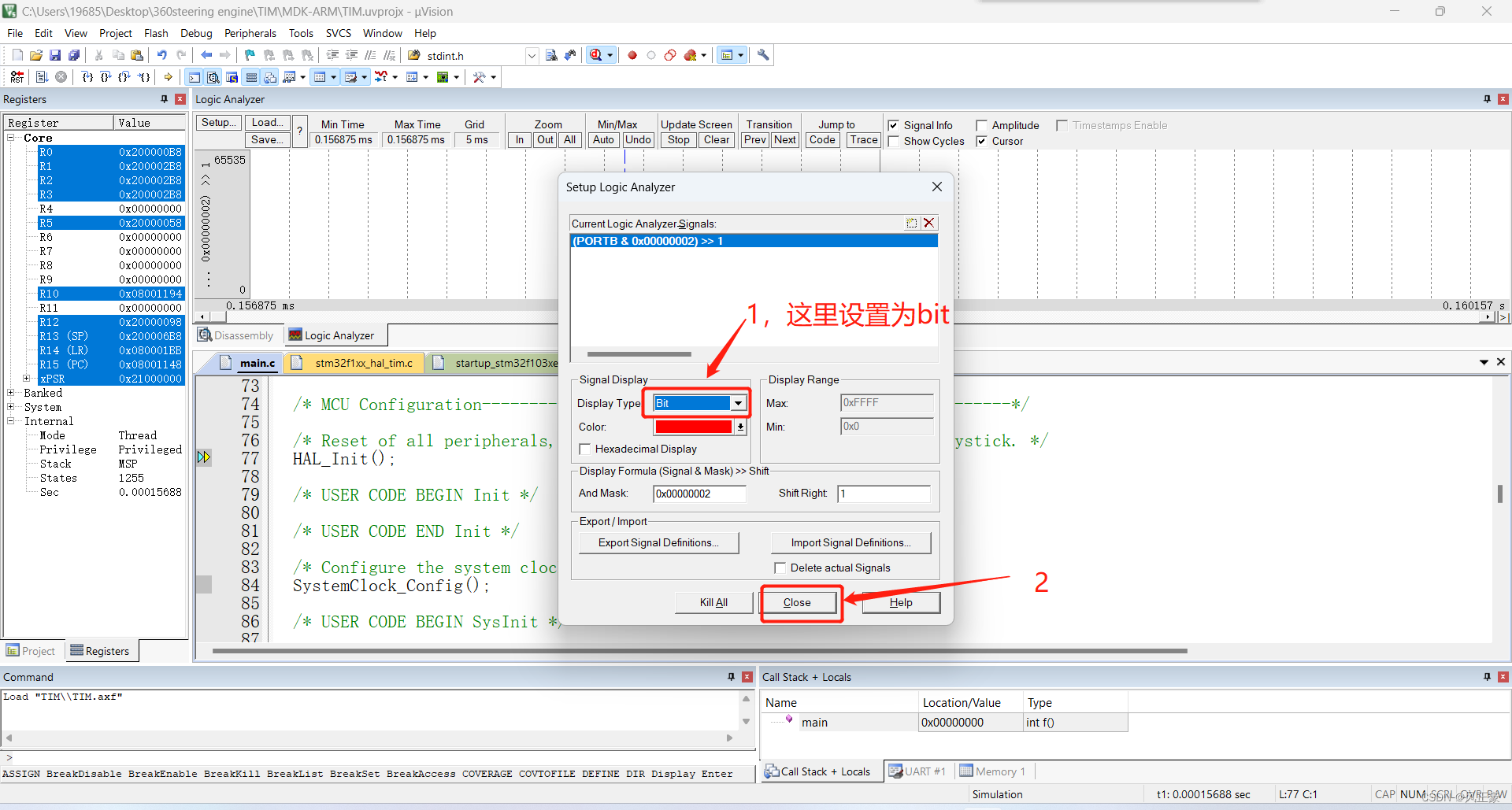
(1)这个我就用软件调试的方法来显示算了,因为图片看不出来效果.
(2)建议复制我的,不然容易出问题
DARMSTM.DLL
pSTM32F103ZE(前面有一个-,不过如果你双击鼠标不会包括-。因为我是F103ZE的芯片,所以是这个,如果是C8就改成pSTM32F103C8)
编译无误之后

硬件PWM
cubemx配置
前期配置
前期配置与上面一致
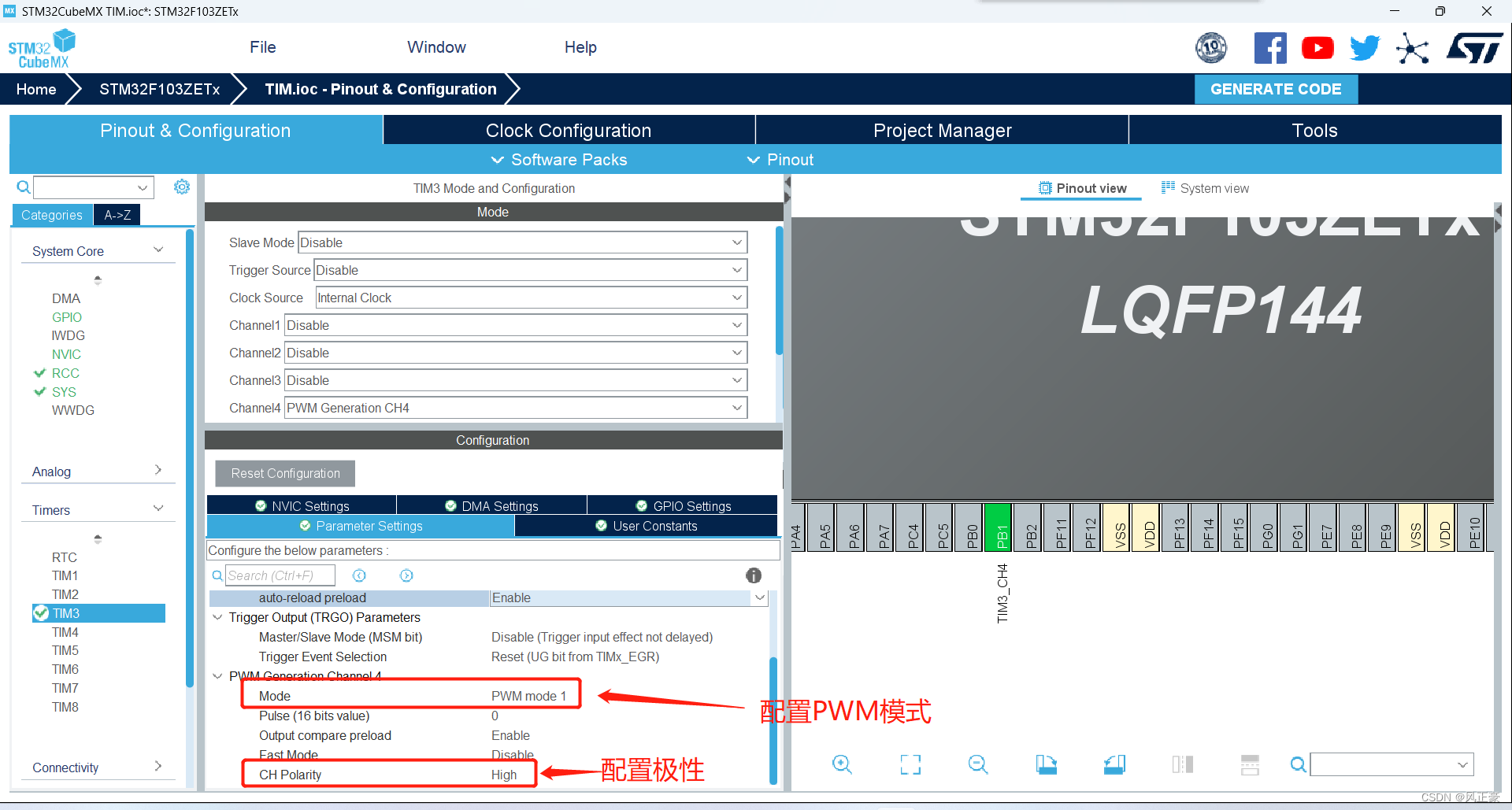
PWM配置
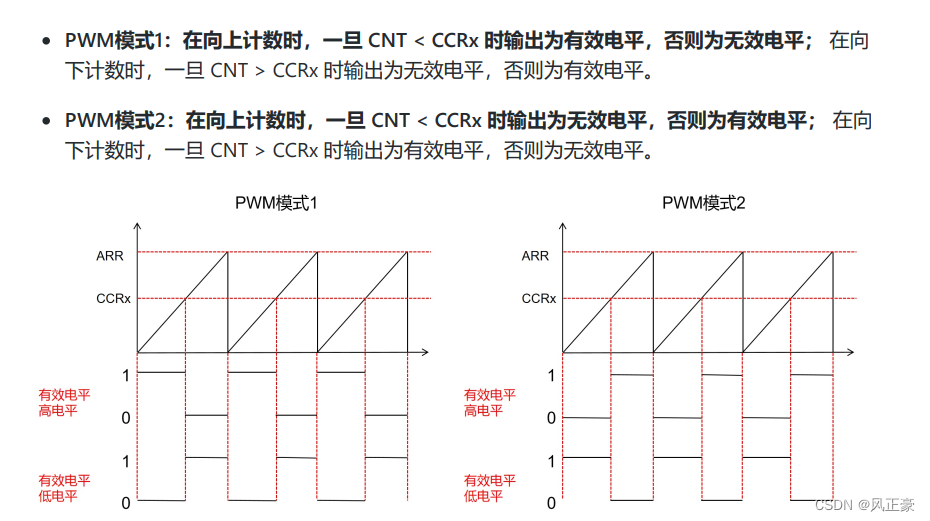
PWM介绍
STM32的PWM比较强大,有两种PWM模式,根据极性不同,又可以变成四种输出方式。比较花哨。
配置
文件生成
与定时器中断部分一致
keil编写
/****这个变量定义写在main.c里面即可*****/
uint16_t PWM_Compare_Value = 16;//PWM比较值/*****这个放在main函数里面,死循环前面,定时器初始化后面****/
// 使能 TIM3 第4通道 PWM 输出
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4);
//配置PWM比较值
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_4, PWM_Compare_Value);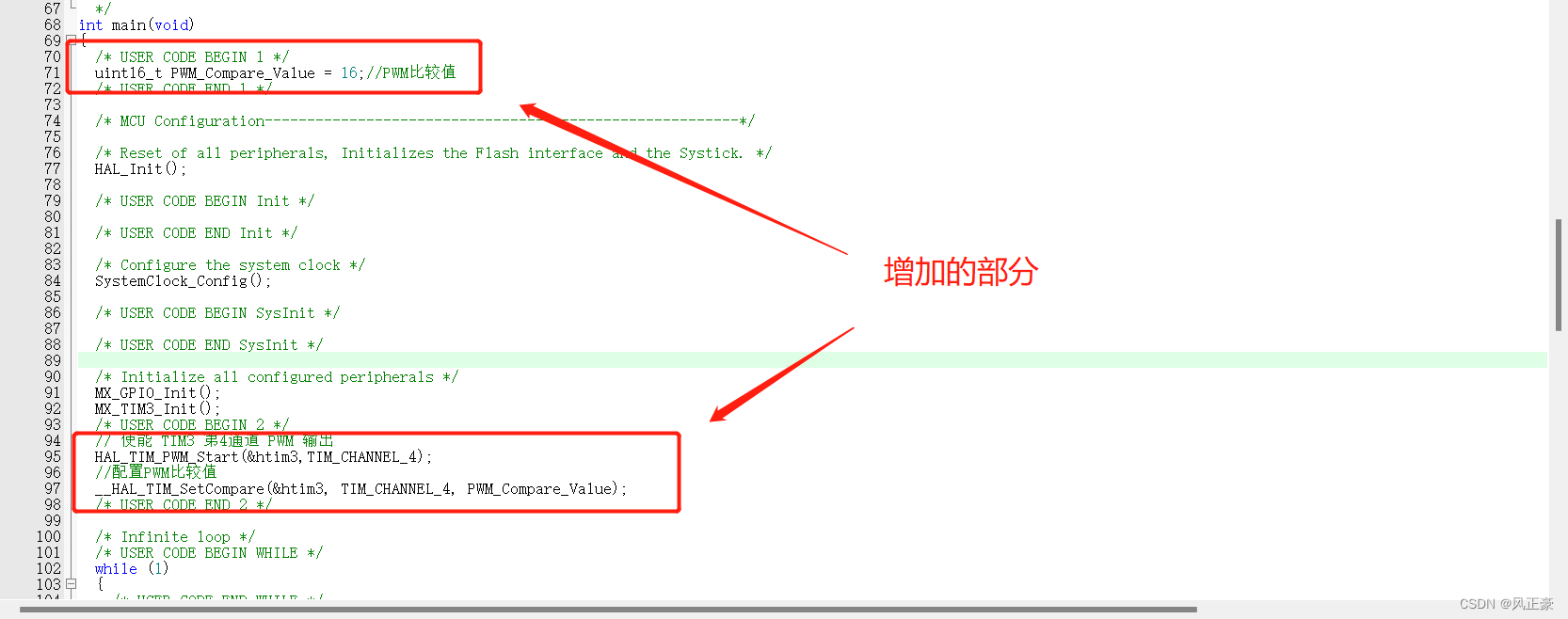
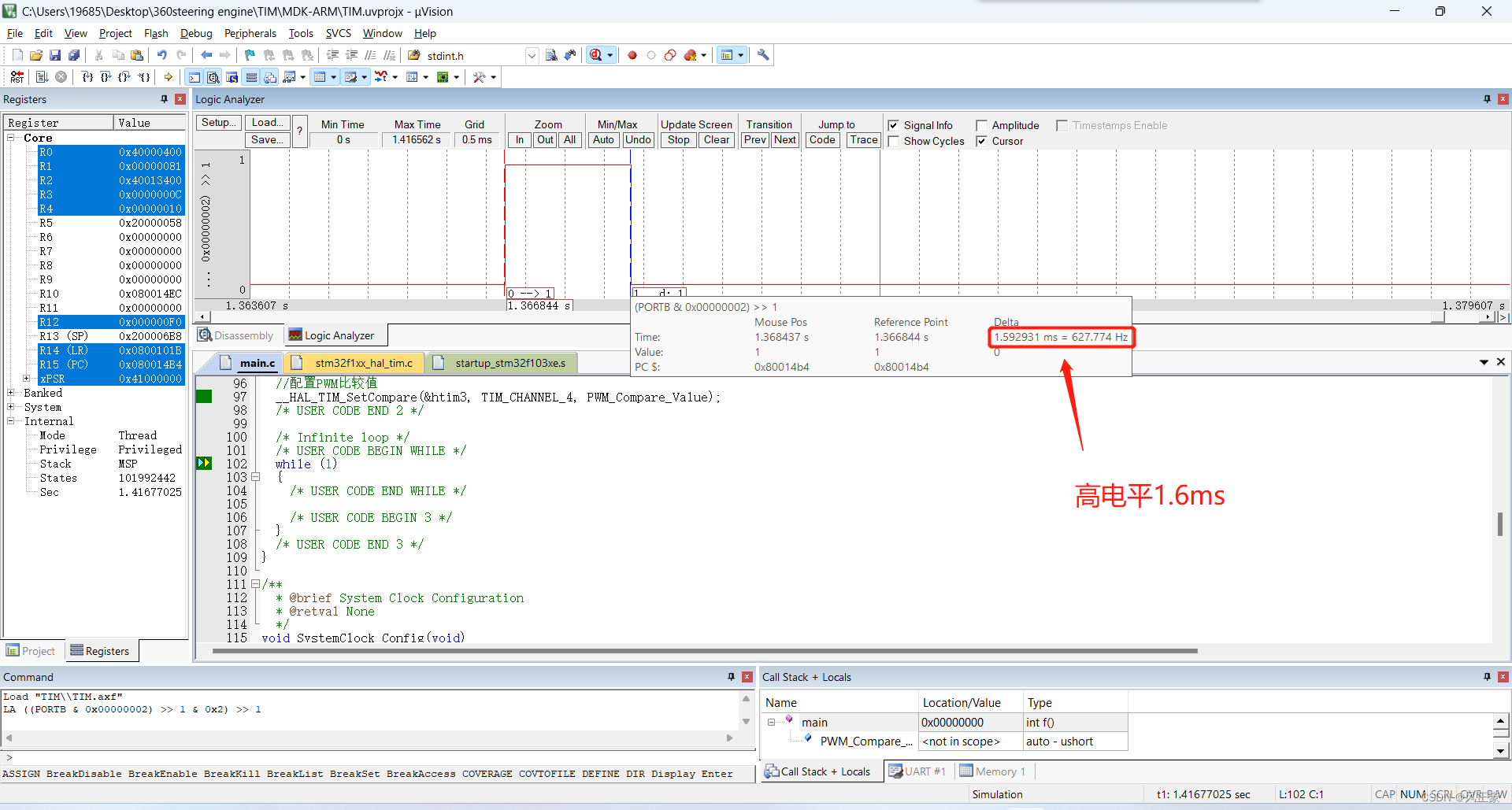
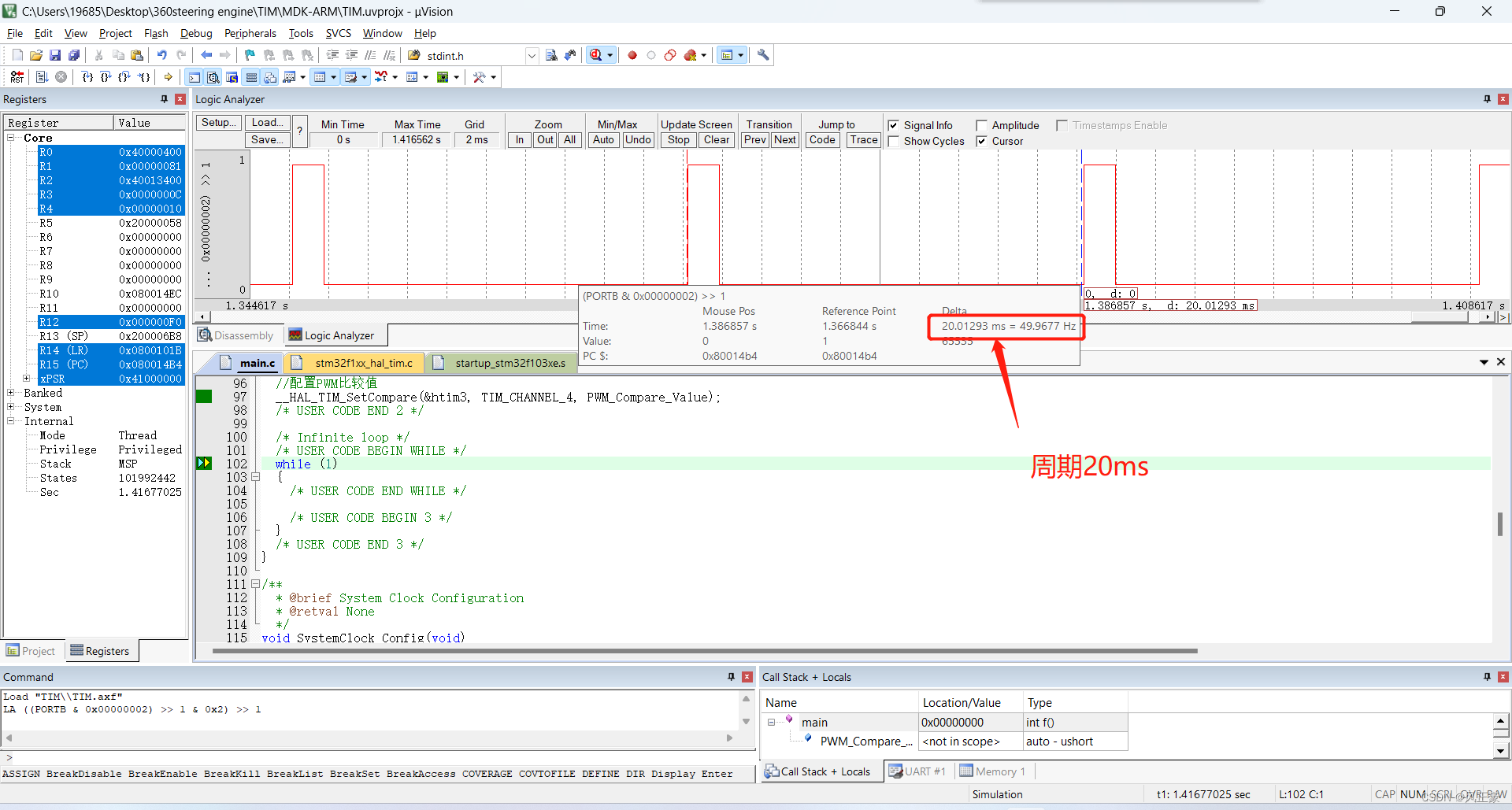
结果
上一篇:VCO pulling
下一篇:Spark 键值对RDD的操作
相关内容
热门资讯
我来教大家“掼蛋大师辅助器ap...
亲,掼蛋大师这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,掼蛋大师的开挂软件,名...
我来教大家“开心联盟辅助器ap...
您好,开心联盟这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中打...
我来教大家“友愉棋牌辅助器ap...
您好,友愉棋牌这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中打...
我来教大家“全盛棋牌辅助器ap...
亲,全盛棋牌这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,全盛棋牌的开挂软件,名...
我来教大家“情怀三三麻将辅助器...
我来教大家“情怀三三麻将辅助器app官方下载最新版本更新”详细分享开挂一、情怀三三麻将AI软件牌型概...
我来教大家“无锡好运麻将辅助器...
亲,无锡好运麻将这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,无锡好运麻将的开挂...
我来教大家“推筒子辅助器app...
您好,推筒子这款游戏可以开挂的,确实是有挂的,需要了解加微{7198902}很多玩家在这款游戏中打牌...
我来教大家“比奇堡辅助器app...
我来教大家“比奇堡辅助器app官方下载最新版本更新”详细分享开挂1、让任何用户在无需AI插件第三方神...
我来教大家“新兴茶苑辅助器ap...
我来教大家“新兴茶苑辅助器app官方下载最新版本更新”详细分享开挂1、让任何用户在无需AI插件第三方...
我来教大家“欢乐互动辅助器ap...
我来教大家“欢乐互动辅助器app官方下载最新版本更新”详细分享开挂1、让任何用户在无需AI插件第三方...
我来教大家“东方互娱辅助器ap...
亲,东方互娱这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,东方互娱的开挂软件,名...
我来教大家“天天乐清麻将辅助器...
我来教大家“天天乐清麻将辅助器app官方下载最新版本更新”详细分享开挂一、天天乐清麻将AI软件牌型概...
我来教大家“唐三彩辅助器app...
我来教大家“唐三彩辅助器app官方下载最新版本更新”详细分享开挂一、唐三彩AI软件牌型概率发牌机制”...
我来教大家“Y0辅助器app官...
我来教大家“Y0辅助器app官方下载最新版本更新”详细分享开挂一、Y0AI软件牌型概率发牌机制”必胜...
我来教大家“天天互娱辅助器ap...
亲,天天互娱这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,天天互娱的开挂软件,名...
我来教大家“悟空竞技麻将辅助器...
亲,悟空竞技麻将这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,悟空竞技麻将的开挂...
我来教大家“情怀开化麻将辅助器...
我来教大家“情怀开化麻将辅助器app官方下载最新版本更新”详细分享开挂一、情怀开化麻将AI软件牌型概...
我来教大家“龙炎互娱辅助器ap...
我来教大家“龙炎互娱辅助器app官方下载最新版本更新”详细分享开挂一、龙炎互娱AI软件牌型概率发牌机...
我来教大家“闲逸碰胡辅助器ap...
亲,闲逸碰胡这款游戏可以开挂的,确实是有挂的,。但是开挂要下载第三方辅助软件,闲逸碰胡的开挂软件,名...
我来教大家“友聚麻将辅助器ap...
我来教大家“友聚麻将辅助器app官方下载最新版本更新”详细分享开挂一、友聚麻将AI软件牌型概率发牌机...